Trajectories
- class roboticstoolbox.tools.trajectory.Trajectory(name, t, s, sd=None, sdd=None, istime=False)[source]
Bases:
objectA container class for trajectory data.
- __init__(name, t, s, sd=None, sdd=None, istime=False)[source]
Construct a new trajectory instance
- Parameters:
The object has attributes:
tthe independent variablesthe positionsdthe velocitysddthe acceleration
If
tis time, ie.istimeis True, then the units ofsdandsddare \(s^{-1}\) and \(s^{-2}\) respectively, otherwise with respect tot.Note
Data is stored with timesteps as rows and axes as columns.
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- property q
Position trajectory
Note
This is a synonym for
.s, for compatibility with other applications.
- property qd
Velocity trajectory
- Returns:
trajectory velocity with one row per timestep, one column per axis
- Return type:
Note
This is a synonym for
.sd, for compatibility with other applications.
- property qdd
Acceleration trajectory
- Returns:
trajectory acceleration with one row per timestep, one column per axis
- Return type:
Note
This is a synonym for
.sdd, for compatibility with other applications.
- property naxes
Number of axes in the trajectory
- Returns:
number of axes or dimensions
- Return type:
- plot(block=False, plotargs=None, textargs=None)[source]
Plot trajectory
- Parameters:
block (bool) – wait till plot is dismissed
Plot the position, velocity and acceleration data. The format of the plot depends on the function that created it.
quinticandtrapezoidalshow the individual points with markerstrapezoidalcolor code the different motion phasesjtrajgeneral m-axis trajectory, show legend
- Seealso:
- roboticstoolbox.tools.trajectory.quintic(q0, qf, t, qd0=0, qdf=0)[source]
Generate scalar polynomial trajectory
- Parameters:
- Returns:
trajectory
- Return type:
Trajectoryinstance
tg = quintic(q0, q1, m)is a scalar trajectory (Mx1) that varies smoothly fromq0toqfusing a quintic polynomial. The initial and final velocity and acceleration are zero.mis an integer scalar, indicating the total number of timesteps andVelocity is in units of distance per trajectory step, not per second.
Acceleration is in units of distance per trajectory step squared, not per second squared.
tg = quintic(q0, q1, t)as above buttis a uniformly-spaced time vectorVelocity is in units of distance per second.
Acceleration is in units of distance per second squared.
The return value is an object that contains position, velocity and acceleration data.
Example:
>>> from roboticstoolbox import quintic >>> tg = quintic(1, 2, 10) >>> tg Trajectory created by quintic: 10 time steps x 1 axes >>> len(tg) 10 >>> tg.q array([1. , 1.0115, 1.0764, 1.2099, 1.3967, 1.6033, 1.7901, 1.9236, 1.9885, 2. ]) >>> tg.plot()
(
Source code,png,hires.png,pdf)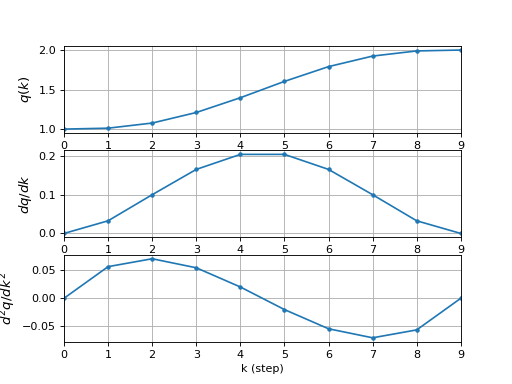
Note
The time vector T is assumed to be monotonically increasing, and time scaling is based on the first and last element.
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso:
{kind=link}
{kind=link}
- roboticstoolbox.tools.trajectory.quintic_func(q0, qf, T, qd0=0, qdf=0)[source]
Quintic scalar polynomial as a function
- Parameters:
- Returns:
polynomial function \(f: t \mapsto (q(t), \dot{q}(t), \ddot{q}(t))\)
- Return type:
callable
Returns a function which computes the specific quintic polynomial, and its derivatives, as described by the parameters.
Example:
>>> from roboticstoolbox import quintic_func >>> f = quintic_func(1, 2, 5) >>> f(0) (np.float64(1.0000000000000016), np.float64(-2.3697948985101913e-16), np.float64(5.345116710353537e-17)) >>> f(5) (np.float64(2.000000000000007), np.float64(3.027634566665771e-17), np.float64(-3.2772179067719343e-15)) >>> f(2.5) (np.float64(1.5000000000000024), np.float64(0.3750000000000015), np.float64(1.163674191728692e-15))
- Seealso:
- roboticstoolbox.tools.trajectory.lspb(*args, **kwargs)[source]
Warning
Deprecated, use
trapezoidalinstead.
- roboticstoolbox.tools.trajectory.trapezoidal(q0, qf, t, V=None)[source]
Scalar trapezoidal trajectory
- Parameters:
- Returns:
trajectory
- Return type:
Trajectoryinstance
Computes a trapezoidal trajectory, which has a linear motion segment with parabolic blends.
tg = trapezoidal(q0, qf, t)is a scalar trajectory (Mx1) that varies smoothly fromq0toqfin M steps using a constant velocity segment and parabolic blends. Timetcan be either:an integer scalar, indicating the total number of timesteps
Velocity is in units of distance per trajectory step, not per second.
Acceleration is in units of distance per trajectory step squared, not per second squared.
an array_like, containing the time steps.
Results are scaled to units of time.
tg = trapezoidal(q0, q1, t, V)as above but specifies the velocity of the linear segment which is normally computed automatically.
The return value is an object that contains position, velocity and acceleration data.
Example:
>>> from roboticstoolbox import trapezoidal >>> tg = trapezoidal(1, 2, 10) >>> tg Trajectory created by trapezoidal: 10 time steps x 1 axes >>> len(tg) 10 >>> tg.q array([1. , 1.0278, 1.1111, 1.25 , 1.4167, 1.5833, 1.75 , 1.8889, 1.9722, 2. ])
(
Source code,png,hires.png,pdf)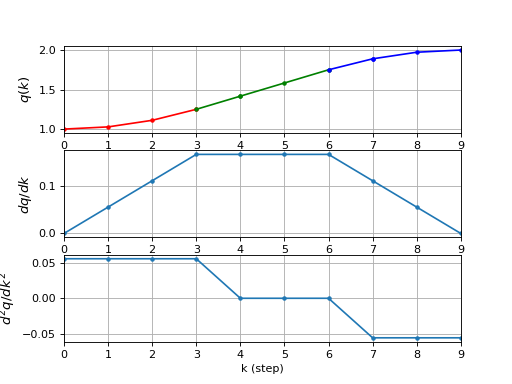
Note
For some values of
Vno solution is possible and an error is flagged.The time vector, if given, is assumed to be monotonically increasing, and time scaling is based on the first and last element.
tghas an extra attributetblendwhich is the blend duration.
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso:
{kind=link}
{kind=link}
- roboticstoolbox.tools.trajectory.trapezoidal_func(q0, qf, T, V=None)[source]
Trapezoidal scalar profile as a function
- Parameters:
- Returns:
trapezoidal profile function \(f: t \mapsto (q(t), \dot{q}(t), \ddot{q}(t))\)
- Return type:
callable
Returns a function which computes the specific trapezoidal profile, and its derivatives, as described by the parameters.
Example:
>>> from roboticstoolbox import trapezoidal_func >>> f = trapezoidal_func(1, 2, 5) >>> f(0) (array([1.]), array([0.]), array([0.18])) >>> f(5) (array([2.]), array([0.]), array([-0.18])) >>> f(2.5) (array([1.5]), array([0.3]), array([0]))
- roboticstoolbox.tools.trajectory.mtraj(tfunc, q0, qf, t)[source]
Multi-axis trajectory
- Parameters:
tfunc (callable) – a 1D trajectory function, eg.
quintic()ortrapezoidal()q0 (ndarray(m)) – initial configuration
qf (ndarray(m)) – final configuration
t (array_like or int) – time vector or number of steps
- Raises:
TypeError –
tfuncis not callableValueError – length of
q0andqfare different
- Returns:
trajectory
- Return type:
Trajectoryinstance
tg = mtraj(func, q0, qf, n)is a multi-axis trajectory varying from configurationq0(M) toqf(M) according to the scalar trajectory functiontfuncinnsteps.tg = mtraj(func, q0, qf, t)as above buttis a uniformly-spaced time vector
The scalar trajectory function is applied to each axis:
tg = tfunc(s0, sF, n)
and possible values of
tfuncincludetrapezoidalfor a trapezoidal trajectory, orquinticfor a polynomial trajectory.The return value is an object that contains position, velocity and acceleration data.
Note
The time vector, if given, is assumed to be monotonically increasing, and time scaling is based on the first and last element.
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso:
- roboticstoolbox.tools.trajectory.jtraj(q0, qf, t, qd0=None, qd1=None)[source]
Compute a joint-space trajectory
- Parameters:
- Returns:
trajectory
- Return type:
Trajectoryinstance
tg = jtraj(q0, qf, N)is a joint space trajectory where the joint coordinates vary fromq0(M) toqf(M). A quintic (5th order) polynomial is used with default zero boundary conditions for velocity and acceleration. Time is assumed to vary from 0 to 1 inNsteps.tg = jtraj(q0, qf, t)as above buttis a uniformly-spaced time vector
The return value is an object that contains position, velocity and acceleration data.
Note
The time vector, if given, scales the velocity and acceleration outputs assuming that the time vector starts at zero and increases linearly.
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso:
ctraj(),qplot(),jtraj()
- roboticstoolbox.tools.trajectory.ctraj(T0, T1, t=None, s=None)[source]
Cartesian trajectory between two poses
- Parameters:
- Return T0:
smooth path from
T0toT1- Return type:
SE3
ctraj(T0, T1, n)is a Cartesian trajectory from SE3 poseT0toT1withnpoints that follow a trapezoidal velocity profile along the path. The Cartesian trajectory is an SE3 instance containingnvalues.ctraj(T0, T1, t)as above but the trajectory is sampled at the points in the arrayt.ctraj(T0, T1, s=s)as above but the elements ofsspecify the fractional distance along the path, and these values are in the range [0 1]. The i’th point corresponds to a distances[i]along the path.Examples:
>>> tg = ctraj(SE3.Rand(), SE3.Rand(), 20) >>> len(tg) 20
Note
In the second case
scould be generated by a scalar trajectory
generator such as
quinticortrapezoidal(default). - Orientation interpolation is performed using unit-quaternion interpolation.- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso:
trapezoidal(),interp()
- roboticstoolbox.tools.trajectory.mstraj(viapoints, dt, tacc, qdmax=None, tsegment=None, q0=None, qd0=None, qdf=None, verbose=False)[source]
Multi-segment multi-axis trajectory
- Parameters:
dt (float (seconds)) – time step
tacc (float) – acceleration time (seconds)
qdmax (array_like(n) or float, optional) – maximum speed, defaults to None
tsegment (array_like, optional) – maximum time of each motion segment (seconds), defaults to None
q0 (array_like(n), optional) – initial coordinates, defaults to first row of viapoints
qd0 (array_like(n), optional) – inital velocity, defaults to zero
qdf (array_like(n), optional) – final velocity, defaults to zero
verbose (bool, optional) – print debug information, defaults to False
- Returns:
trajectory
- Return type:
Trajectoryinstance
Computes a trajectory for N axes moving smoothly through a set of viapoints. The motion comprises M segments:
The initial coordinates are the first row of
viapointsorq0if provided.The final coordinates are the last row of
viapointsEach segment is linear motion and polynomial blends connect the viapoints.
All joints arrive at each via point at the same time, ie. the motion is coordinated across axes
The time of the segments can be specified in two different ways:
In terms of segment time where
tsegmentis an array of segment times which is the number of via points minus one:traj = mstraj(viapoints, dt, tacc, tsegment=TS)
Governed by the speed of the slowest axis for the segment. The axis speed is a scalar (all axes have the same speed) or an N-vector of speed per axis:
traj = mstraj(viapoints, dt, tacc, qdmax=SPEED)
The return value is a namedtuple (named
mstraj) with elements:tthe time coordinate as a numpy ndarray, shape=(K,)qthe axis values as a numpy ndarray, shape=(K,N)arrivea list of arrival times for each segmentinfoa list of named tuples, one per segment that describe the slowest axis, segment time, and time stampviathe passed set of via points
The trajectory proper is (
traj.t,traj.q). The trajectory is a matrix has one row per time step, and one column per axis.Note
Only one of
qdmagortsegmentcan be specifiedIf
taccis greater than zero then the path smoothly accelerates between segments using a polynomial blend. This means that the the via point is not actually reached.The path length K is a function of the number of via points and the time or velocity limits that apply.
Can be used to create joint space trajectories where each axis is a joint coordinate.
Can be used to create Cartesian trajectories where the “axes” correspond to translation and orientation in RPY or Euler angle form.
If
qdmaxis a scalar then all axes are assumed to have the same maximum speed.tghas extra attributesarrive,infoandvia
- References:
Robotics, Vision & Control in Python, 3e, P. Corke, Springer 2023, Chap 3.
- Seealso: