Color operations
These functions perform operations related to colorimetery and spectra. More comprehensive Python tools for color science can be found at color-science.org.
- machinevisiontoolbox.base.color.loadspectrum(λ, filename, verbose=False, method='linear', **kwargs)[source]
Load spectrum data
- Parameters:
λ (array_like(N)) – wavelength 𝜆 [m]
filename (str) – filename, an extension of
.datwill be added if not providedkwargs – keyword arguments for scipy.interpolate.interp1d
- Returns:
interpolated spectral data and corresponding wavelength
- Return type:
ndarray(N), ndarray(N,D)
Load spectral data from the file
filenameand interpolate it to the wavelengths [meters] specified in 𝜆. The spectral data can be scalar (D=1) or vector (D>1) valued.Example:
>>> from machinevisiontoolbox import loadspectrum >>> import numpy as np >>> l = np.linspace(380, 700, 10) * 1e-9 # visible spectrum >>> sun = loadspectrum(l, "solar") >>> print(sun[:5]) [6.2032e+08 1.0483e+09 1.3558e+09 1.3212e+09 1.3962e+09]
Note
The file contains columns of data, white space separated, and the first column is wavelength in metres. The remaining columns are linearly interpolated and returned as columns of S.
The files are kept in the private folder inside the
mvtb_datapackage with extension .datDefault interpolation mode is linear, to change this use
kind=a string such as “slinear”, “quadratic”, “cubic”, etc. See scipy.interpolate.interp1d for more info.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- machinevisiontoolbox.base.color.blackbody(λ, T)[source]
Compute blackbody emission spectrum
- Parameters:
λ (float, array_like(N)) – wavelength 𝜆 [m]
T (float) – blackbody temperature [K]
- Returns:
blackbody radiation power density
- Return type:
float, ndarray(N)
Compute the blackbody radiation power density [W/m^3] at the wavelength 𝜆 [m] and temperature T [K].
If 𝜆 is an array, then the result is an array of blackbody radiation power density at the corresponding elements of 𝜆.
Example:
>>> from machinevisiontoolbox import blackbody >>> import numpy as np >>> l = np.linspace(380, 700, 10) * 1e-9 # visible spectrum >>> e = blackbody(l, 6500) # emission of sun >>> print(e[:5]) [4.4517e+13 4.6944e+13 4.7506e+13 4.6676e+13 4.4890e+13]
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- machinevisiontoolbox.base.color.lambda2rg(λ, e=None, **kwargs)[source]
RGB chromaticity coordinates
- Parameters:
λ (float, array_like(N)) – wavelength 𝜆 [m]
e (array_like(N), optional) – illlumination spectrum defined at the wavelengths 𝜆
- Returns:
rg-chromaticity
- Return type:
ndarray(2), ndarray(N,2)
Compute the rg-chromaticity coordinate for illumination at the specific wavelength \(\lambda\) [m]. If \(\lambda\) is an array, then the result is an array where the rows are the chromaticity coordinates at the corresponding elements of \(\lambda\).
If
eis given, compute the rg-chromaticity coordinate for an illumination spectrum \(\texttt{e}(\lambda)\) defined at corresponding wavelengths of \(\lambda\).Example:
>>> from machinevisiontoolbox import lambda2rg, loadspectrum >>> import numpy as np >>> lambda2rg(550e-9) array([0.0974, 0.9051]) >>> lambda2rg([550e-9, 600e-9]) array([[0.0974, 0.9051], [0.8475, 0.1537]]) >>> l = np.linspace(380, 700, 10) * 1e-9 # visible spectrum >>> e = loadspectrum(l, "solar") >>> lambda2rg(l, e) array([0.3308, 0.3547])
Note
Data from Color & Vision Research Laboratory
From Table I(5.5.3) of Wyszecki & Stiles (1982). (Table 1(5.5.3) of Wyszecki & Stiles (1982) gives the Stiles & Burch functions in 250 cm-1 steps, while Table I(5.5.3) of Wyszecki & Stiles (1982) gives them in interpolated 1 nm steps.).
The Stiles & Burch 2-deg CMFs are based on measurements made on 10 observers. The data are referred to as pilot data, but probably represent the best estimate of the 2 deg CMFs, since, unlike the CIE 2 deg functions (which were reconstructed from chromaticity data), they were measured directly.
These CMFs differ slightly from those of Stiles & Burch (1955). As noted in footnote a on p. 335 of Table 1(5.5.3) of Wyszecki & Stiles (1982), the CMFs have been “corrected in accordance with instructions given by Stiles & Burch (1959)” and renormalized to primaries at 15500 (645.16), 19000 (526.32), and 22500 (444.44) cm-1.
- machinevisiontoolbox.base.color.cmfrgb(λ, e=None, **kwargs)[source]
RGB color matching function
- Parameters:
λ (array_like(N)) – wavelength 𝜆 [m]
e (array_like(N), optional) – illlumination spectrum defined at the wavelengths 𝜆
- Returns:
RGB color matching function
- Return type:
ndarray(3), ndarray(N,3)
The color matching function is the CIE RGB tristimulus required to match a particular wavelength excitation.
Compute the CIE RGB color matching function for illumination at wavelength \(\lambda\) [m]. This is the RGB tristimulus that has the same visual sensation as the single wavelength \(\lambda\).
If 𝜆 is an array then each row of the result is the color matching function of the corresponding element of \(\lambda\).
If
eis given, compute the CIE color matching function for an illumination spectrum \(\texttt{e}(\lambda)\) defined at corresponding wavelengths of \(\lambda\). This is the tristimulus that has the same visual sensation as \(\texttt{e}(\lambda)\).Example:
>>> from machinevisiontoolbox import cmfrgb, loadspectrum >>> cmfrgb(550e-9) array([ 0.0228, 0.2118, -0.0006]) >>> cmfrgb([550e-9, 600e-9]) array([[ 0.0228, 0.2118, -0.0006], [ 0.3443, 0.0625, -0.0005]]) >>> l = np.linspace(380, 700, 10) * 1e-9 # visible spectrum >>> e = loadspectrum(l, "solar") >>> cmfrgb(l, e) array([2.4265, 2.6018, 2.3069])
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.tristim2cc(tri)[source]
Tristimulus to chromaticity coordinates
- Parameters:
tri (array_like(3), array_like(N,3), ndarray(N,M,3)) – RGB or XYZ tristimulus
- Returns:
chromaticity coordinates
- Return type:
ndarray(2), ndarray(N,2), ndarray(N,N,2)
Compute the chromaticity coordinate corresponding to the tristimulus
tri. Multiple tristimulus values can be given as rows oftri, in which case the chromaticity coordinates are the corresponding rows of the result.\[r = \frac{R}{R+G+B},\, g = \frac{G}{R+G+B},\, b = \frac{B}{R+G+B}\]or
\[x = \frac{X}{X+Y+Z},\, y = \frac{Y}{X+Y+Z},\, z = \frac{Z}{X+Y+Z}\]In either case, \(r+g+b=1\) and \(x+y+z=1\) so one of the three chromaticity coordinates is redundant.
If
triis a color image, a 3D array, then compute the chromaticity coordinates corresponding to every pixel in the tristimulus image. The result is an image with two planes corresponding to r and g, or x and y (depending on whether the input image was RGB or XYZ).Example:
>>> from machinevisiontoolbox import tristim2cc, iread >>> tristim2cc([100, 200, 50]) array([0.2857, 0.5714]) >>> img, _ = iread('flowers1.png') >>> cc = tristim2cc(img) >>> cc.shape (426, 640, 2)
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- machinevisiontoolbox.base.color.lambda2xy(λ, *args)[source]
XY-chromaticity coordinates for a given wavelength 𝜆 [meters]
- Parameters:
λ (float or array_like(N)) – wavelength 𝜆 [m]
- Returns:
xy-chromaticity
- Return type:
ndarray(2), ndarray(N,2)
Compute the xy-chromaticity coordinate for illumination at the specific wavelength \(\lambda\) [m]. If \(\lambda\) is an array, then the result is an array where the rows are the chromaticity coordinates at the corresponding elements of \(\lambda\).
Example:
>>> from machinevisiontoolbox import lambda2xy >>> lambda2xy(550e-9) array([0.3016, 0.6923]) >>> lambda2xy([550e-9, 600e-9]) array([[0.3016, 0.6923], [0.627 , 0.3725]])
- machinevisiontoolbox.base.color.cmfxyz(λ, e=None, **kwargs)[source]
Color matching function for xyz tristimulus
- Parameters:
λ (array_like(N)) – wavelength 𝜆 [m]
e (array_like(N), optional) – illlumination spectrum defined at the wavelengths 𝜆
- Returns:
XYZ color matching function
- Return type:
ndarray(3), ndarray(N,3)
The color matching function is the XYZ tristimulus required to match a particular wavelength excitation.
Compute the CIE XYZ color matching function for illumination at wavelength \(\lambda\) [m]. This is the XYZ tristimulus that has the same visual sensation as the single wavelength \(\lambda\).
If \(\lambda\) is an array then each row of the result is the color matching function of the corresponding element of \(\lambda\).
If
eis given, compute the CIE XYZ color matching function for an illumination spectrum \(\texttt{e}(\lambda)\) defined at corresponding wavelengths of \(\lambda\). This is the XYZ tristimulus that has the same visual sensation as \(\texttt{e}(\lambda)\).Example:
>>> from machinevisiontoolbox import cmfxyz, loadspectrum >>> cmfxyz(550e-9) array([[0.4334, 0.995 , 0.0087]]) >>> cmfxyz([550e-9, 600e-9]) array([[0.4334, 0.995 , 0.0087], [1.0622, 0.631 , 0.0008]]) >>> l = np.linspace(380, 700, 10) * 1e-9 # visible spectrum >>> e = loadspectrum(l, "solar") >>> cmfxyz(l, e) array([[138.8309, 145.0858, 130.529 ]])
Note
CIE 1931 2-deg XYZ CMFs from from Color & Vision Research Laboratory
- machinevisiontoolbox.base.color.luminos(λ, **kwargs)[source]
Photopic luminosity function
- Parameters:
λ (float, array_like(N)) – wavelength 𝜆 [m]
- Returns:
luminosity
- Return type:
float, ndarray(N)
Return the photopic luminosity function for the wavelengths in \(\lambda\) [m]. If \(\lambda`𝜆 is an array then the result is an array whose elements are the luminosity at the corresponding :math:\)lambda`.
Example:
>>> from machinevisiontoolbox import luminos >>> luminos(550e-9) 679.585 >>> luminos([550e-9, 600e-9]) array([679.585, 430.973])
Note
Luminosity has units of lumens, which are the intensity with which wavelengths are perceived by the light-adapted human eye.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.rluminos(λ, **kwargs)[source]
Relative photopic luminosity function
- Parameters:
λ (float, array_like(N)) – wavelength 𝜆 [m]
- Returns:
relative luminosity
- Return type:
float, ndarray(N)
Return the relative photopic luminosity function for the wavelengths in \(\lambda\) [m]. If \(\lambda\) is an array then the result is a vector whose elements are the luminosity at the corresponding \(\lambda\).
Example:
>>> from machinevisiontoolbox import rluminos >>> rluminos(550e-9) 0.9949501 >>> rluminos([550e-9, 600e-9]) array([0.995, 0.631])
Note
Relative luminosity lies in the interval 0 to 1, which indicate the intensity with which wavelengths are perceived by the light-adapted human eye.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- machinevisiontoolbox.base.color.ccxyz(λ, e=None)[source]
xyz chromaticity coordinates
- Parameters:
λ (float, array_like(N)) – wavelength 𝜆 [m]
e (array_like(N), optional) – illlumination spectrum defined at the wavelengths 𝜆 (optional)
- Returns:
xyz-chromaticity coordinates
- Return type:
ndarray(3), ndarray(N,3)
Compute the xyz-chromaticity coordinates for illumination at the specific wavelength \(\lambda\) [m]. If \(\lambda\) is an array, then the result is an where the rows are the chromaticity coordinates at the corresponding elements of \(\lambda\).
If
eis given, compute the xyz-chromaticity coordinates for an illumination spectrum \(\texttt{e}(\lambda)\) defined at corresponding wavelengths of \(\lambda\). This is the tristimulus that has the same visual sensation as \(\texttt{e}(\lambda)\).Example:
- machinevisiontoolbox.base.color.name2color(name, colorspace='RGB', dtype='float')[source]
Map color name to value
- Parameters:
name (str) – name of a color
colorspace (str, optional) – name of colorspace, one of:
'rgb'[default],'xyz','xy','ab'dtype – datatype of returned numeric values
- Type:
str
- Returns:
color tristimulus or chromaticity value
- Return type:
ndarray(3), ndarray(2)
Looks up the RGB tristimulus for this color using
matplotlib.colorsand converts it to the desiredcolorspace.RGB tristimulus values are in the range [0,1]. If
dtypeis specified, the values are scaled to the range [0,M] where M is the maximum positive value ofdtypeand cast to typedtype.Colors can have long names like
'red'or'sky blue'as well as single character names like'r','g','b','c','m','y','w','k'.If a Python-style regexp is passed, then the return value is a list of matching color names.
Example:
>>> from machinevisiontoolbox import name2color >>> name2color('r') array([1., 0., 0.]) >>> name2color('r', dtype='uint8') array([255, 0, 0], dtype=uint8) >>> name2color('r', 'xy') array([0.64, 0.33]) >>> name2color('lime green') >>> name2color('.*burnt.*') ['xkcd:burnt siena', 'xkcd:burnt yellow', 'xkcd:burnt red', 'xkcd:burnt umber', 'xkcd:burnt sienna', 'xkcd:burnt orange']
Note
Uses color database from Matplotlib.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.color2name(color, colorspace='RGB')[source]
Map color value to color name
- Parameters:
color (array_like(3), array_like(2)) – color value
colorspace (str, optional) – name of colorspace, one of:
'rgb'[default],'xyz','xy','ab'
- Returns:
color name
- Return type:
str
Converts the given value from the specified
colorspaceto RGB and finds the closest (Euclidean distance) value inmatplotlib.colors.Example:
>>> from machinevisiontoolbox import color2name >>> color2name(([0 ,0, 1])) 'blue' >>> color2name((0.2, 0.3), 'xy') 'deepskyblue'
Note
Color name may contain a wildcard, eg. “?burnt”
Uses color database from Matplotlib
Tristiumuls values are [0,1]
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.XYZ2RGBxform(white='D65', primaries='sRGB')[source]
Transformation matrix from XYZ to RGB colorspace
- Parameters:
white (str, optional) – illuminant: ‘E’ or ‘D65’ [default]
primaries (str, optional) – xy coordinates of primaries to use:
'CIE','ITU=709'or'sRGB'[default]
- Raises:
ValueError – bad white point, bad primaries
- Returns:
transformation matrix
- Return type:
ndarray(3,3)
Return a \(3 \times 3\) matrix that transforms an XYZ tristimulus value to an RGB tristimulus value. The transformation applies to linear, non gamma encoded, tristimulus values.
Example:
>>> from machinevisiontoolbox import XYZ2RGBxform >>> XYZ2RGBxform() array([[0.4124, 0.3576, 0.1805], [0.2126, 0.7152, 0.0722], [0.0193, 0.1192, 0.9505]])
Note
Use the inverse of the transform for RGB to XYZ.
Works with linear RGB colorspace, not gamma encoded
- Seealso:
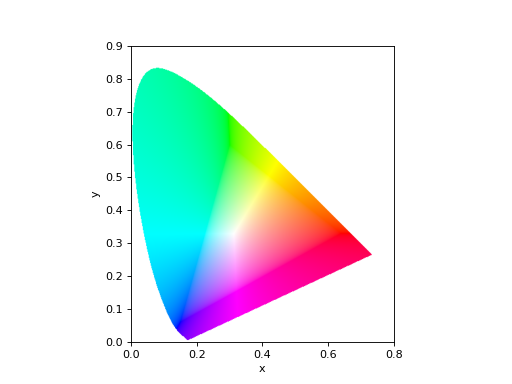
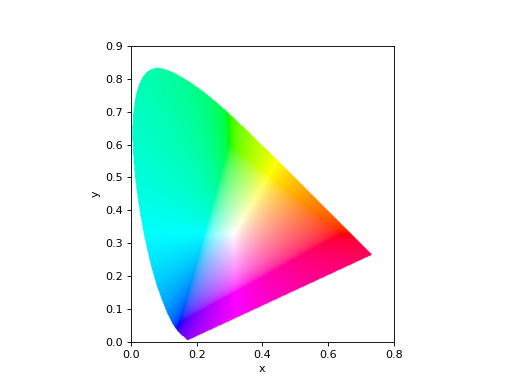
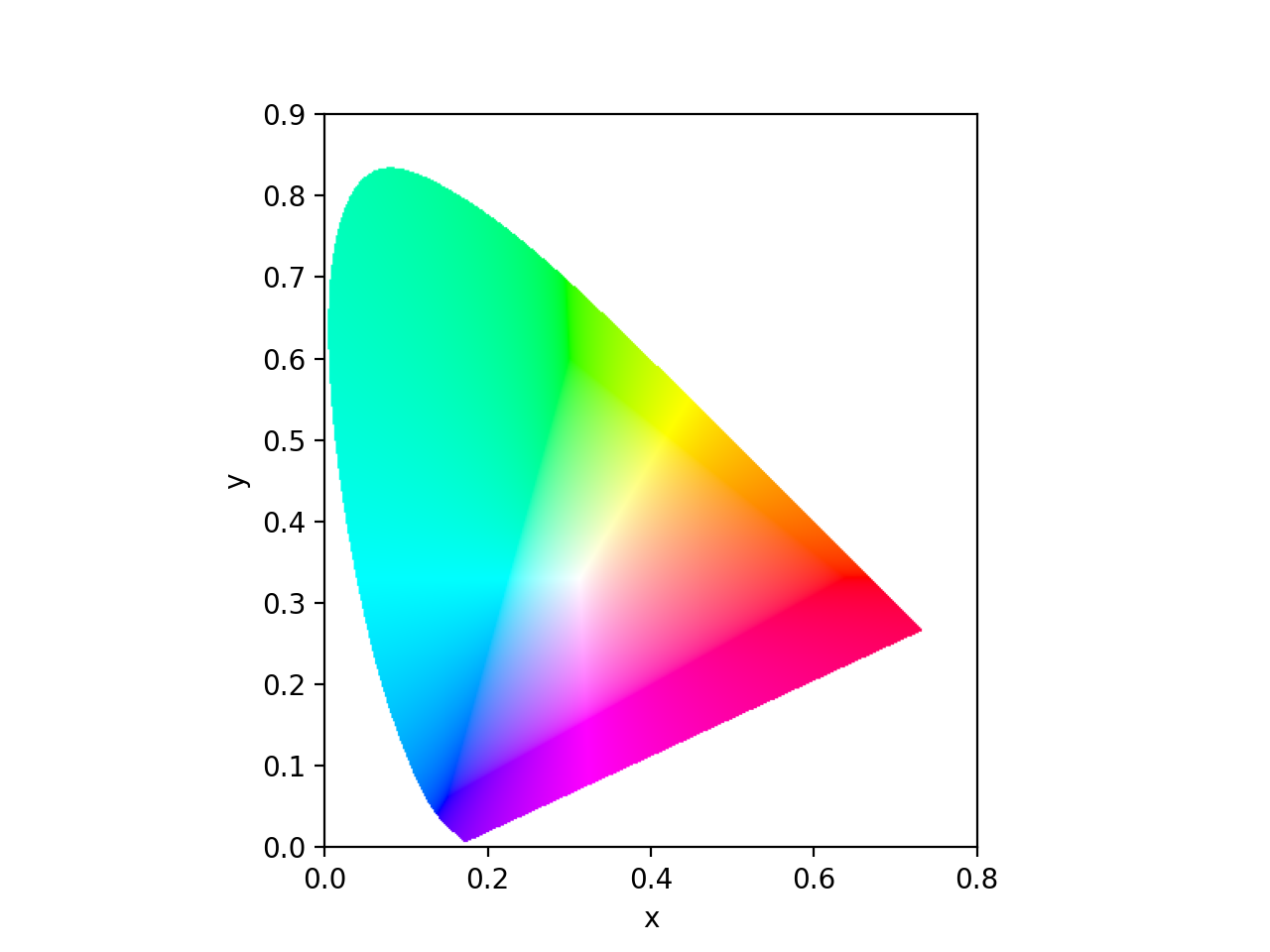
- machinevisiontoolbox.base.color.plot_chromaticity_diagram(colorspace='xy', brightness=1, N=500, alpha=1, block=False)[source]
Display chromaticity diagram
- Parameters:
colorspace (string) – colorspace to show: ‘xy’ [default], ‘lab’, ‘ab’
brightness (float, optional) – for xy this is Y, for ab this is L, defaults to 1
N (integer, optional) – number of points to sample in the x- and y-directions, defaults to 500
alpha (float, optional) – alpha value for plot in the range [0,1], defaults to 1
block (bool) – block until plot is dismissed, defaults to False
- Returns:
chromaticity diagram as an image
- Return type:
ndarray(N,N,3)
Display, using Matplotlib, a chromaticity diagram as an image using Matplotlib. This is the “horseshoe-shaped” curve bounded by the spectral locus, and internal pixels are an approximation of their true color (at the specified
brightness).Example:
>>> from machinevisiontoolbox import plot_chromaticity_diagram >>> plot_chromaticity_diagram() # show filled chromaticity diagram
(Source code, png, hires.png, pdf)
Note
The colors shown within the locus only approximate the true colors, due to the gamut of the display device.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
{kind=link}
{kind=link}
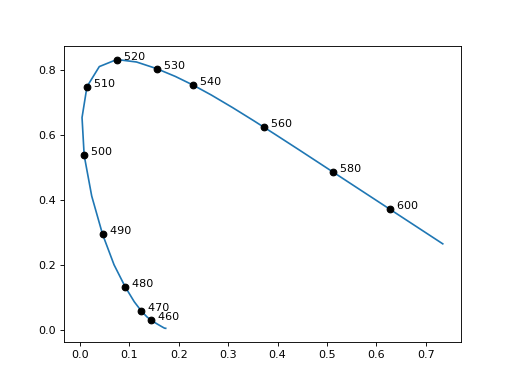
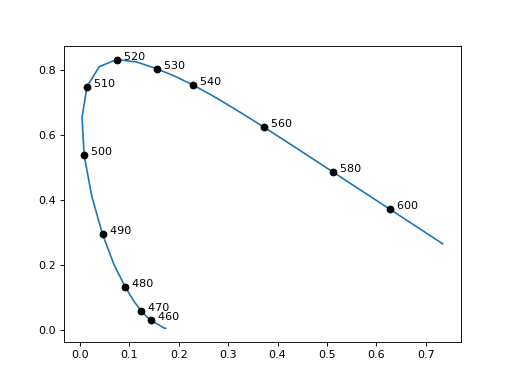
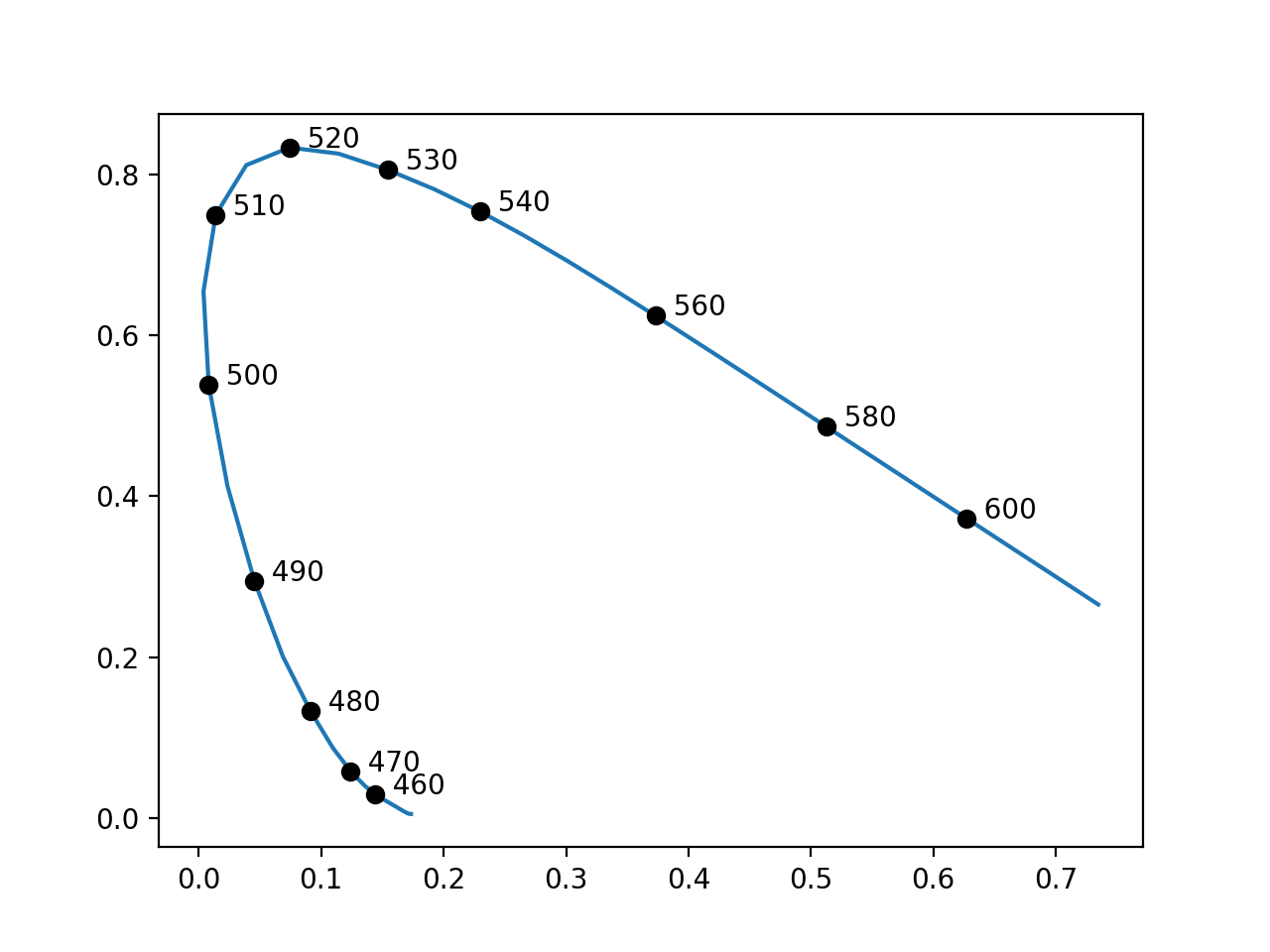
- machinevisiontoolbox.base.color.plot_spectral_locus(colorspace='xy', labels=True, ax=None, block=False, lambda_ticks=None)[source]
Plot spectral locus
- Parameters:
colorspace (str, optional) – the color space: ‘xy’ [default] or ‘rg’
labels (bool, optional) – display wavelength labels, defaults to True
ax (axes, optional) – Matplotlib axes to draw into, defaults to current
block (bool, optional) – block until plot is dismissed, defaults to False
lambda_ticks (array_like, optional) – interval between wavelength labels, defaults to None
- Raises:
ValueError – unknown colorspace
Plot, using Matplotlib, the boundary of the “horseshoe” in the chromaticity diagram which represents pure spectral colors. Labelled points are added to the boundary at default spacing, but \(\lambda\) values can be specified by the iterable
lambda_ticks.Typically, would be used in conjunction with
plot_chromaticity_diagramto plot chromaticity diagram with labelled boundary.Example:
>>> from machinevisiontoolbox import plot_spectral_locus >>> plot_spectral_locus() # add the border
(Source code, png, hires.png, pdf)
- Seealso:
{kind=link}
{kind=link}
- machinevisiontoolbox.base.color.cie_primaries()[source]
CIE primary wavelengths
cie_primariesis a 3-vector with the wavelengths [m] of the CIE-1976 red, green and blue primaries respectively.Example:
>>> from machinevisiontoolbox import cie_primaries >>> cie_primaries()*1e9 array([700. , 546.1, 435.8])
- machinevisiontoolbox.base.color.colorspace_convert(image, src, dst)[source]
Convert images between colorspaces
- Parameters:
image (ndarray(H,W,3), (N,3)) – input image
src (str) – input colorspace name
dst (str) – output colorspace name
- Returns:
output image
- Return type:
ndarray(N,M,3), (N,3)
Convert images or rowwise color coordinates from one color space to another. The work is done by OpenCV and assumes that the input image is linear, not gamma encoded, and the result is also linear.
Color space names (synonyms listed on the same line) are:
Color space name
Option string(s)
grey scale
'grey','gray'RGB (red/green/blue)
'rgb'BGR (blue/green/red)
'bgr'CIE XYZ
'xyz','xyz_709'YCrCb
'ycrcb'HSV (hue/sat/value)
'hsv'HLS (hue/lightness/sat)
'hls'CIE L*a*b*
'lab', ‘l*a*b*'CIE L*u*v*
'luv','l*u*v*'Example:
>>> from machinevisiontoolbox import colorspace_convert >>> colorspace_convert([0, 0, 1], 'rgb', 'hls') array([240. , 0.5, 1. ])
- Seealso:
- machinevisiontoolbox.base.color.gamma_encode(image, gamma='sRGB')[source]
Gamma encoding
- Parameters:
image (ndarray(H,W), ndarray(H,W,N)) – input image
gamma (float, str) – gamma exponent or “srgb”
- Returns:
gamma encoded version of image
- Return type:
ndarray(H,W), ndarray(H,W,N)
Maps linear tristimulus values to a gamma encoded values using either:
\(y = x^\gamma\)
the sRGB mapping which is an exponential as above, with a linear segment near zero.
Note
Gamma encoding should be applied to any image prior to display, since the display assumes the image is gamma encoded. If not encoded, the displayed image will appear very contrasty.
Gamma encoding is typically performed in a camera with \(\gamma=0.45\).
For images with multiple planes, the gamma encoding is applied to each plane.
For images of type double, the pixels are assumed to be in the range 0 to 1.
For images of type int, the pixels are assumed in the range 0 to the maximum value of their class. Pixels are converted first to double, encoded, then converted back to the integer class.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.gamma_decode(image, gamma='sRGB')[source]
Gamma decoding
- Parameters:
image (ndarray(H,W), ndarray(H,W,N)) – input image
gamma (float, str) – gamma exponent or “srgb”
- Returns:
gamma decoded version of image
- Return type:
ndarray(H,W), ndarray(H,W,N)
Maps linear tristimulus values to a gamma encoded values using either:
\(y = x^\gamma\)
the sRGB mapping which is an exponential as above, with a linear segment near zero.
Note
Gamma decoding should be applied to any color image prior to colometric operations.
Gamma decoding is typically performed in the display with \(\gamma=2.2\).
For images with multiple planes, the gamma correction is applied to each plane.
For images of type double, the pixels are assumed to be in the range 0 to 1.
For images of type int, the pixels are assumed in the range 0 to the maximum value of their class. Pixels are converted first to double, encoded, then converted back to the integer class.
- References:
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- Seealso:
- machinevisiontoolbox.base.color.shadow_invariant(image, θ=None, geometricmean=True, exp=False, sharpen=None, primaries=None)[source]
Shadow invariant image
- Parameters:
image (ndarray(H,W,3) float) – linear color image
geometricmean (bool, optional) – normalized with geometric mean of color channels, defaults to True
exp (bool, optional) – exponentiate the logarithmic image, defaults to False
sharpen (ndarray(3,3), optional) – a sharpening transform, defaults to None
primaries (array_like(3), optional) – camera peak filter responses (nm), defaults to None
- Returns:
greyscale shadow invariant image
- Return type:
ndarray(H,W)
Computes the greyscale invariant image computed from the passed color image with a projection line of slope
θ.If
θis not provided then the slope is computed from the camera spectral characteristicsprimariesa vector of the peak response of the camera’s filters in the order red, green, blue. If these aren’t provided they default to 610, 538, and 460nm.Example:
>>> im = iread('parks.png', gamma='sRGB', dtype='double') >>> gs = shadow_invariant(im, 0.7) >>> idisp(gs)
Note
The input image is assumed to be linear, that is, it has been gamma decoded.
- References:
“Dealing with shadows: Capturing intrinsic scene appear for image-based outdoor localisation,” P. Corke, R. Paul, W. Churchill, and P. Newman Proc. Int. Conf. Intelligent Robots and Systems (IROS), pp. 2085–2 2013.
Robotics, Vision & Control for Python, Section 10.1, P. Corke, Springer 2023.
- machinevisiontoolbox.base.color.esttheta(im, sharpen=None)[source]
Estimate theta for shadow invariance
- Parameters:
im (ndarray(H,W,3)) – input image
sharpen (ndarray(3,3), optional) – a sharpening transform, defaults to None
- Returns:
the value of θ
- Return type:
float
This is an interactive procedure where the image is displayed and the user selects a region of homogeneous material (eg. grass or road) that includes areas that are directly lit by the sun and in shadow.
Note
The user selects boundary points by clicking the mouse. After the last point, hit the Enter key and the region will be closed.