Block library
The block diagrams comprise blocks which belong to one of a number of different categories. These come from
the package bdsim.blocks, roboticstoolbox.blocks, machinevisiontoolbox.blocks.
Icons, if shown to the left of the black header bar, are as used with bdedit.

Block class hierarchy, arrow from parent class to subclass
Source blocks
Source blocks:
have outputs but no inputs
have no state variables
are a subclass of
SourceBlock→Block
- class bdsim.blocks.sources.Constant(value=0, **blockargs)[source]
Bases:
SourceBlockCONSTANT

Constant value.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
any
constant
valueThe output value is a constant and can be any Python type, for example float, list or Numpy ndarray.
- __init__(value=0, **blockargs)[source]
- Parameters:
value (any, optional) – the constant, defaults to 0
blockargs (dict) –
common block options
- class bdsim.blocks.sources.Piecewise(*args, seq=None, **blockargs)[source]
Bases:
SourceBlock,EventSourcePIECEWISE

Piecewise constant signal.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
float
\(y(t)\)
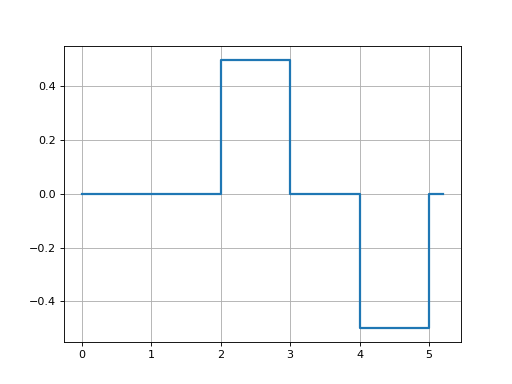
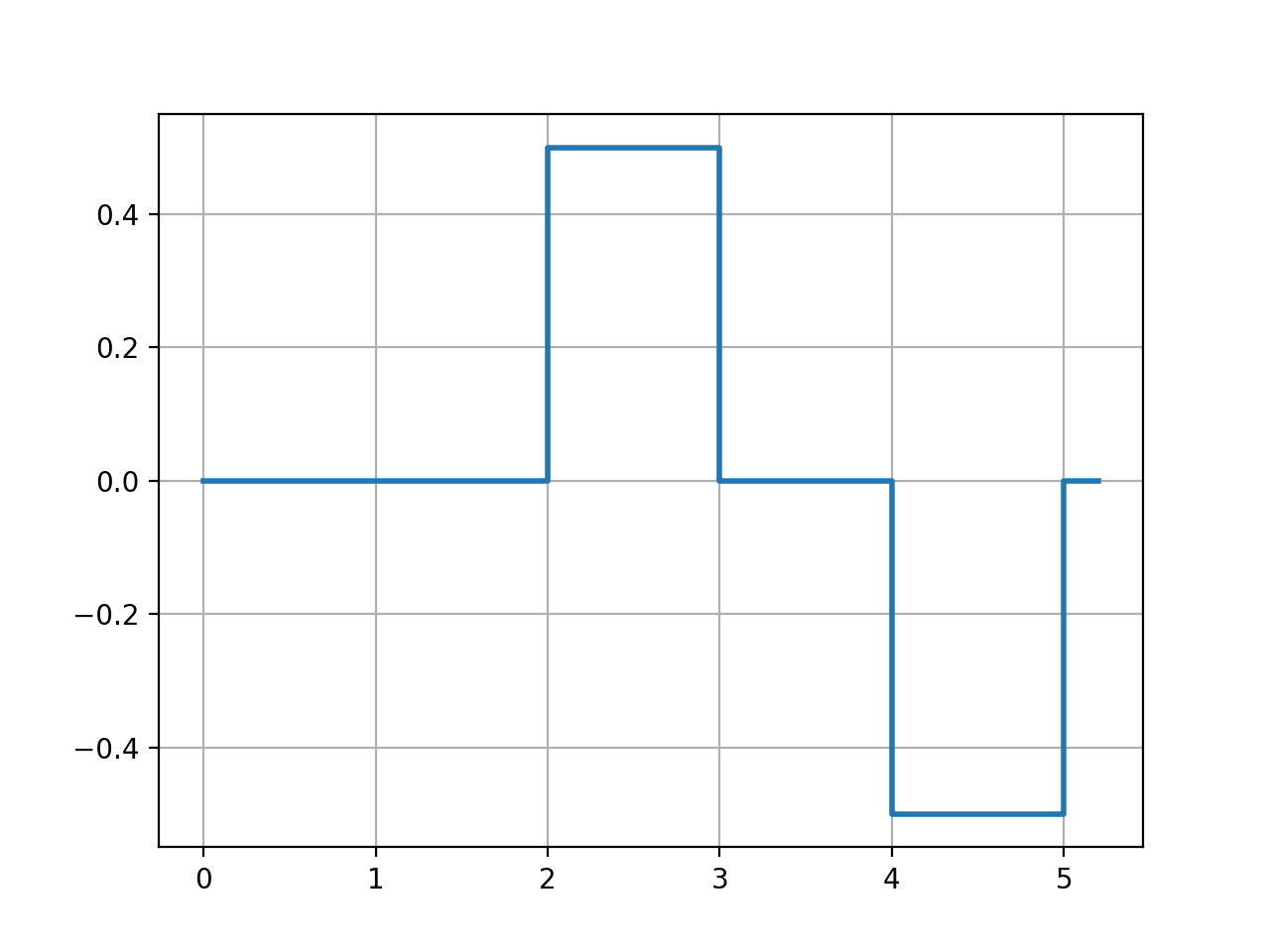
Generate a signal that is a piecewise constant function of time. This is described as a series of 2-tuples (time, value). The output value is taken from the active tuple, that is, the latest one in the list whose time is no greater than simulation time.
The tuples can be provided in two different ways. Firstly, a form convenient for Python programming:
steering = bd.PIECEWISE((0,0), (2, 0.5), (3,0), (4,-0.5), (5,0))
Secondly, in a form that can be used from
bdsimwhere we explicitly pass in a list in a way that can be represented in a JSON file:steering = bd.PIECEWISE(seq=[(0,0), (3, 0.5), (4,0), (5,-0.5), (6,0)])
(
Source code,png,hires.png,pdf)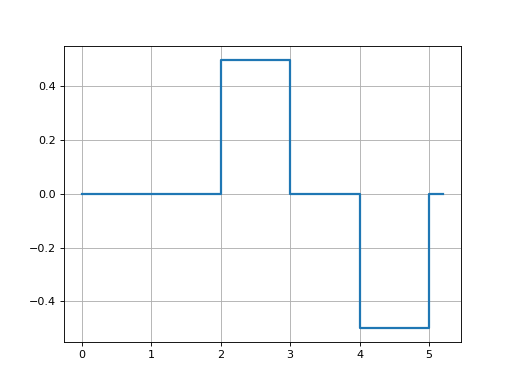
Note
The tuples must be ordered by monotonically increasing time.
There is no default initial value, the list should contain a tuple with time zero otherwise the output will be undefined.
Note
The block declares an event for the start of each segment.
- Seealso:
declare_events()
- __init__(*args, seq=None, **blockargs)[source]
- Parameters:
seq (list of 2-element iterables) – sequence of time, value pairs
blockargs (dict) –
common block options
{kind=link}
{kind=link}
- class bdsim.blocks.sources.Ramp(T=1, off=0, slope=1, **blockargs)[source]
Bases:
SourceBlock,EventSourceRAMP

Ramp signal.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
float
\(y(t)\)
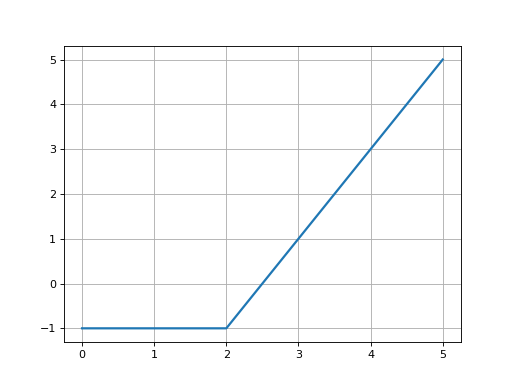
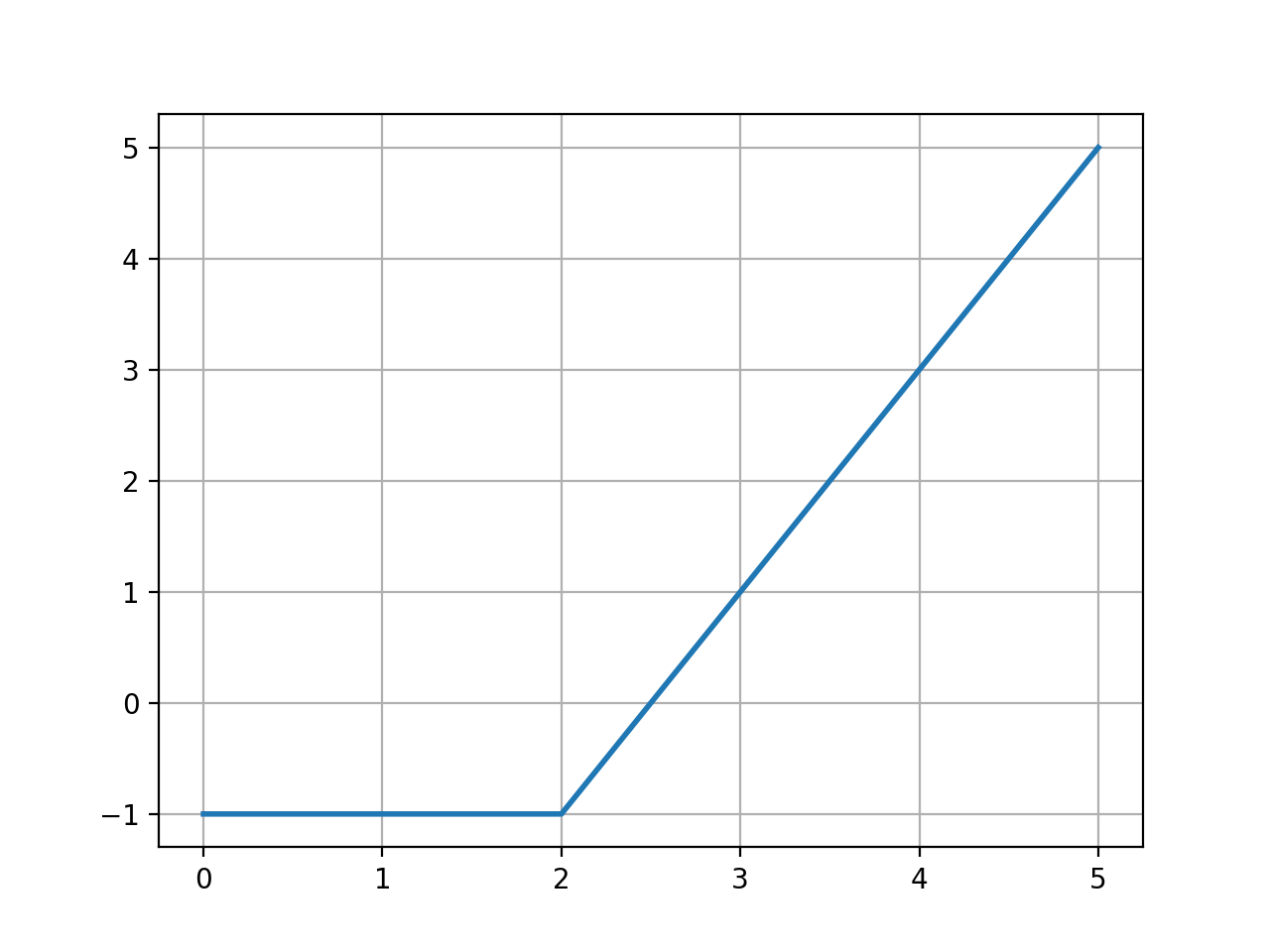
Generate a signal that starts increasing from the value
offwhen time equalsTlinearly with time, with a gradient ofslope.Example:
step = bd.RAMP(2, off=-1, slope=2/3, T=2)
(
Source code,png,hires.png,pdf)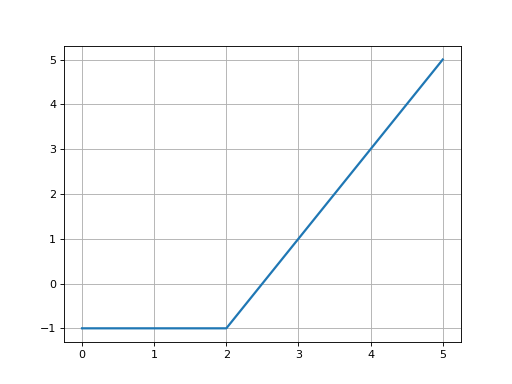
Note
The block declares an event for the ramp start time.
- Seealso:
declare_event()
{kind=link}
{kind=link}
- class bdsim.blocks.sources.Step(T=1, off=0, on=1, **blockargs)[source]
Bases:
SourceBlock,EventSourceSTEP

Step signal.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
float
\(y(t)\)
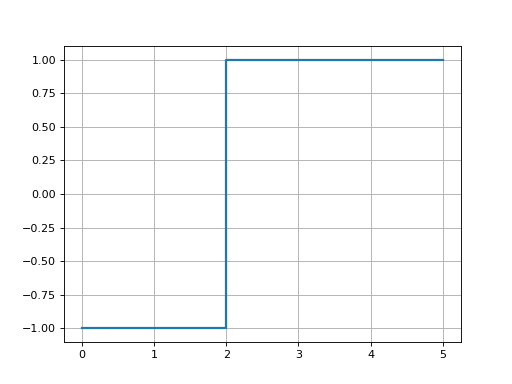
Generate a step signal that transitions from the value
offtoonwhen time equalsT.Example:
step = bd.STEP(2, off=-1, on=1)
(
Source code,png,hires.png,pdf)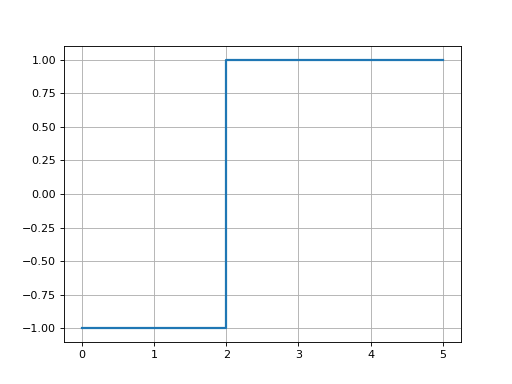
Note
The block declares an event for the step time.
- Seealso:
declare_events()
{kind=link}
{kind=link}
- class bdsim.blocks.sources.Time(value=None, **blockargs)[source]
Bases:
SourceBlockTIME

Simulation time.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
float
\(t\)
Outputs the current simulation time.
For example:
time = bd.TIME()
- __init__(value=None, **blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
- class bdsim.blocks.sources.WaveForm(wave='square', freq=1, unit='Hz', phase=0, amplitude=1, offset=0, min=None, max=None, duty=0.5, **blockargs)[source]
Bases:
SourceBlock,EventSourceWAVEFORM

Waveform generator.
- Inputs:
0
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Output
0
float
\(y(t)\)
A general waveform generator. For example:
wave = bd.WAVEFORM(wave='sine', freq=2) # 2Hz sine wave varying from -1 to 1 wave = bd.WAVEFORM(wave='square', freq=2, unit='rad/s') # 2rad/s square wave varying from -1 to 1
The minimum and maximum values of the waveform are given by default in terms of amplitude and offset. The signals are symmetric about the offset value. For example:
wave = bd.WAVEFORM(wave='sine') # varies between -1 and +1 wave = bd.WAVEFORM(wave='sine', amplitude=2) # varies between -2 and +2 wave = bd.WAVEFORM(wave='sine', offset=1) # varies between 0 and +2 wave = bd.WAVEFORM(wave='sine', amplitude=2, offset=1) # varies between -1 and +3
Alternatively we can specify the minimum and maximum values which override amplitude and offset:
wave = bd.WAVEFORM(wave='triangle', min=0, max=5) # varies between 0 and +5
At time 0 the sine and triangle wave are zero and increasing, and the square wave has its first rise. We can specify a phase shift with a number in the range [0,1] where 1 corresponds to one cycle.
Note
For discontinuous signals (square, triangle) the block declares events for every discontinuity.
- Seealso:
declare_events()
- __init__(wave='square', freq=1, unit='Hz', phase=0, amplitude=1, offset=0, min=None, max=None, duty=0.5, **blockargs)[source]
- Parameters:
wave (str, optional) – type of waveform to generate, one of: ‘sine’, ‘square’ [default], ‘triangle’
freq (float, optional) – frequency, defaults to 1
unit (str, optional) – frequency unit, one of: ‘rad/s’, ‘Hz’ [default]
amplitude (float, optional) – amplitude, defaults to 1
offset (float, optional) – signal offset, defaults to 0
phase (float, optional) – Initial phase of signal in the range [0,1], defaults to 0
min (float, optional) – minimum value, defaults to None
max (float, optional) – maximum value, defaults to None
duty (float, optional) – duty cycle for square wave in range [0,1], defaults to 0.5
blockargs (dict) –
common block options
Sink blocks
Sink blocks:
have inputs but no outputs
have no state variables
are a subclass of
SinkBlock→Blockthat perform graphics are a subclass of
GraphicsBlock→SinkBlock→Block
- class bdsim.blocks.sinks.Event(direction, func, fargs=None, fkwargs=None, **blockargs)[source]
Bases:
SinkBlockEVENT

Runtime event detector for solve_ivp.
- Inputs:
1
- Outputs:
0
- States:
0
The input signal is used as an event function value. A zero crossing triggers an event in
solve_ivp.Direction can be one of:
'^'or'+': positive-going crossing (direction = +1)'v'or'-': negative-going crossing (direction = -1)
Event handling callback signature is:
func(block, *fargs, **fkwargs)where
blockis this EVENT block instance.- __init__(direction, func, fargs=None, fkwargs=None, **blockargs)[source]
- Parameters:
direction (str) – event crossing direction, one of
'^','v','+','-'func (callable) – user callback invoked when event is detected
fargs (list or tuple, optional) – extra positional args passed to callback
fkwargs (dict, optional) – extra keyword args passed to callback
blockargs (dict) –
common block options
- class bdsim.blocks.sinks.Null(nin=1, **blockargs)[source]
Bases:
SinkBlockNULL

Discard signal.
- Inputs:
N
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
Create a sink block with arbitrary number of input ports that discards all data, like
/dev/null. Useful for testing.Note
bdsimissues a warning for unconnected outputs but execution can continue.- __init__(nin=1, **blockargs)[source]
- Parameters:
nin (int, optional) – number of input ports, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.sinks.Print(fmt=None, file=None, **blockargs)[source]
Bases:
SinkBlockPRINT

Print signal.
- Inputs:
1
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
0
any
\(x\)
Creates a console print block which displays the value of the input signal at each simulation time step. The display format is like:
PRINT(print.0 @ t=0.100) [-1.0 0.2]
and includes the block name, time, and the formatted value.
The numerical formatting of the signal is controlled by
fmt:if not provided,
str()is used to format the signalif provided:
a scalar is formatted by the
fmt.format()a NumPy array is formatted by
fmt.format()applied to every element
Examples:
bd.PRINT(name="X") # block name appears in the printed text bd.PRINT(fmt="{:.1f}") # print with explicit format
Note
By default writes to stdout
The output is cleaner if progress bar printing is disabled using the
-pcommand line option.
- __init__(fmt=None, file=None, **blockargs)[source]
- Parameters:
fmt (str, optional) – Format string, defaults to None
file (file object, optional) – file to write data to, defaults to None
blockargs (dict) –
common block options
- Returns:
A PRINT block
- Return type:
Print instance
- class bdsim.blocks.sinks.Stop(func=None, **blockargs)[source]
Bases:
SinkBlockSTOP

Conditionally stop simulation.
- Inputs:
1
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
0
any
\(x\)
Conditionally stop the simulation if the input \(x\) is:
bool type and True
numeric type and > 0
If
funcis provided, then it is applied to the block input and if it returns True the simulation is stopped.- __init__(func=None, **blockargs)[source]
- Parameters:
func (callable, optional) – evaluate stop condition, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.sinks.Watch(nin=1, **blockargs)[source]
Bases:
SinkBlockWATCH

Watch a signal.
- Inputs:
N
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
Causes the output ports connected to this block’s input ports \(x_i\) to be logged during the simulation run. Equivalent to adding it as the
watch=argument tobdsim.run.For example:
step = bd.STEP(5) ramp = bd.RAMP() watch = bd.WATCH(2) # watch 2 ports watch[0] = step watch[1] = ramp
- Seealso:
BDSim.run()
- __init__(nin=1, **blockargs)[source]
- Parameters:
nin (int, optional) – number of input ports, defaults to 1
blockargs (dict) –
common block options
Display blocks
Sink blocks:
have inputs but no outputs
have no state variables
are a subclass of
SinkBlock→Blockthat perform graphics are a subclass of
GraphicsBlock→SinkBlock→Block
- class bdsim.blocks.displays.Scope(nin=1, vector=None, styles=None, stairs=False, scale='auto', labels=None, grid=True, watch=False, title=None, loc='best', **blockargs)[source]
Bases:
GraphicsBlockSCOPE

Plot input signals against time.
- Inputs:
N
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
i
float
\(x_i\) is the i’th line
Create a scope block that plots multiple signals against time.
For each line plotted we can specify the:
line style as a heterogeneous list of:
Matplotlib fmt string comprising a color and line style, eg.
"k"or"r:"a dict of Matplotlib line style options for Line2D , eg.
{"color": "k", "linewidth": 3, "alpha": 0.5)
line label, used in the legend and vertical axis. This can include math mode notation or unicode characters.
The vertical scale factor defaults to auto-scaling but can be fixed by providing a 2-tuple
[ymin, ymax]. All lines are plotted against the same vertical scale.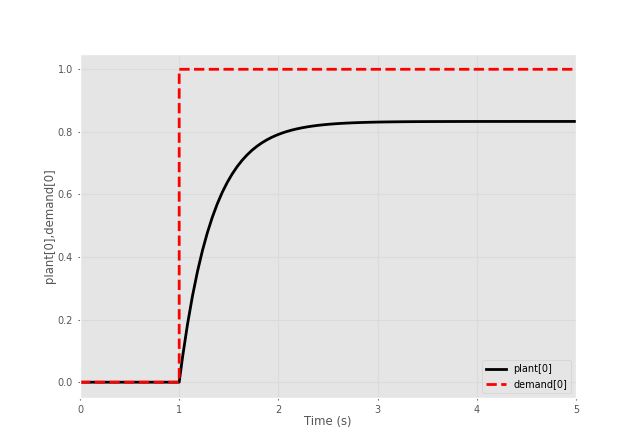
Example of scope display.
Scalar input ports against time
The number of lines to plot will be inferred from:
the length of the
labelslist if specifiedthe length of the
styleslist if specifiedninif specified, it defaults to 1
These numbers must be consistent.
Examples:
bd.SCOPE() # a scope with 1 input port bd.SCOPE(nin=3) # a scope with 3 input ports bd.SCOPE(styles=["k", "r--"]) # a scope with 2 input ports bd.SCOPE(labels=["x", r"$\gamma$"]) # a scope with 2 input ports bd.SCOPE(styles=[{'color': 'blue'}, {'color': 'red', 'linestyle': '--'}])
Single input port with NumPy array
The port is fed with a 1D-array, and
vectoris an:int, this is the expected width of the array, all its elements will be plotted
a list of ints, interpretted as indices of the elements to plot.
Examples:
bd.SCOPE(vector=[0,1,2]) # display elements 0, 1, 2 of array on port 0 bd.SCOPE(vector=[0,1], styles=[{'color': 'blue'}, {'color': 'red', 'linestyle': '--'}])
Note
If the vector is of width 3, by default the inputs are plotted as red, green and blue lines.
If the vector is of width 6, by default the first three inputs are plotted as solid red, green and blue lines and the last three inputs are plotted as dashed red, green and blue lines.
- __init__(nin=1, vector=None, styles=None, stairs=False, scale='auto', labels=None, grid=True, watch=False, title=None, loc='best', **blockargs)[source]
- Parameters:
nin (int, optional) – number of inputs, defaults to 1 or if given, the length of style vector
vector (int or list, optional) – vector signal on single input port, defaults to None
styles (str or dict, list of strings or dicts; one per line, optional) – styles for each line to be plotted
stairs (bool, optional) – force staircase style plot for all lines, defaults to False
scale (str or array_like(2)) – fixed y-axis scale or defaults to ‘auto’
labels (sequence of strings) – labels for the plotted signals, defaults to block name and port of the source of each signal if not given. Used for vertical axis label, legend and cursor readout.
grid (bool or sequence) – draw a grid, defaults to True. Can be boolean or a tuple of options for grid()
watch (bool, optional) – add these signals to the watchlist, defaults to False
title (str) – title of plot
loc (str) – location of legend, see
matplotlib.pyplot.legend(), defaults to “best”blockargs (dict) –
common block options
- class bdsim.blocks.displays.ScopeXY(style=None, scale='auto', aspect='equal', labels=['X', 'Y'], init=None, nin=2, **blockargs)[source]
Bases:
GraphicsBlockSCOPEXY

Plot X against Y.
- Inputs:
2
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
0
float
\(x\)
Input
1
float
\(y\)
Create an XY scope where input \(y\) (vertical axis) is plotted against \(x\) (horizontal axis).
Line style is one of:
Matplotlib fmt string comprising a color and line style, eg.
"k"or"r:"a dict of Matplotlib line style options for Line2D , eg.
dict(color="k", linewidth=3, alpha=0.5)
The scale factor defaults to auto-scaling but can be fixed by providing either:
a 2-tuple
[min, max]which is used for the x- and y-axesa 4-tuple
[xmin, xmax, ymin, ymax]
- __init__(style=None, scale='auto', aspect='equal', labels=['X', 'Y'], init=None, nin=2, **blockargs)[source]
- Parameters:
style (optional str or dict) – line style, defaults to None
scale (str or array_like(2) or array_like(4)) – fixed y-axis scale or defaults to ‘auto’
labels (2-element tuple or list) – axis labels (xlabel, ylabel), defaults to [“X”,”Y”]
init (callable) – function to initialize the graphics, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.displays.ScopeXY1(indices=[0, 1], **blockargs)[source]
Bases:
ScopeXYSCOPEXY1

Plot X[0] against X[1].
- Inputs:
1
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(x\)
Create an XY scope where input \(x_j\) (vertical axis) is plotted against \(x_i\) (horizontal axis). This block has one vector input and the elements to be plotted are given by a 2-element iterable \((i, j)\).
Line style is one of:
Matplotlib fmt string comprising a color and line style, eg.
"k"or"r:"a dict of Matplotlib line style options for Line2D , eg.
dict(color="k", linewidth=3, alpha=0.5)
The scale factor defaults to auto-scaling but can be fixed by providing either:
a 2-tuple
[min, max]which is used for the x- and y-axesa 4-tuple
[xmin, xmax, ymin, ymax]
- __init__(indices=[0, 1], **blockargs)[source]
- Parameters:
indices (array_like(2)) – indices of elements to select from block input vector, defaults to [0,1]
style (optional str or dict) – line style
scale (str or array_like(2) or array_like(4)) – fixed y-axis scale or defaults to ‘auto’
labels (2-element tuple or list) – axis labels (xlabel, ylabel)
init (callable) – function to initialize the graphics, defaults to None
blockargs (dict) –
common block options
Function blocks
Functions
Function blocks:
have inputs and outputs
have no state variables
are a subclass of
FunctionBlock→Block
- class bdsim.blocks.functions.Clip(min=-inf, max=inf, **blockargs)[source]
Bases:
FunctionBlockCLIP

Signal clipping.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
int, float, ndarray
\(x\)
Output
0
int, float, ndarray
\(\min(\max(x,a), b)\)
The input signal is clipped to the range from
minimumtomaximuminclusive.The signal can be a 1D-array in which case each element is clipped. The minimum and maximum values can be:
a scalar, in which case the same value applies to every element of the input vector , or
a 1D-array, of the same shape as the input vector that applies elementwise to the input vector.
For example:
clip = bd.CLIP(-1, 1)
- __init__(min=-inf, max=inf, **blockargs)[source]
- Parameters:
min (scalar or array_like, optional) – Minimum value, defaults to -math.inf
max (float or array_like, optional) – Maximum value, defaults to math.inf
blockargs (dict) –
common block options
- class bdsim.blocks.functions.Function(func=None, nin=1, nout=1, persistent=False, fargs=None, fkwargs=None, **blockargs)[source]
Bases:
FunctionBlockFUNCTION

Python function.
- Inputs:
N
- Outputs:
M
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
Output
j
any
\(f_j(x_0, \ldots, x_{N-1})\)
Inputs to the block are passed as separate arguments to the function. Programmatic ositional or keyword arguments can also be passed to the function.
A block with one output port that sums its two input ports is:
func = bd.FUNCTION(lambda u1, u2: u1+u2, nin=2)
A block with a function that takes two inputs and has two additional arguments:
def myfun(u1, u2, param1, param2): pass FUNCTION(myfun, nin=2, args=(p1,p2))
If we need access to persistent (static) data, to keep some state:
def myfun(u1, u2, param1, param2, state): pass func = bd.FUNCTION(myfun, nin=2, args=(p1,p2), persistent=True)
where a dictionary is passed in as the last argument and which is kept from call to call.
A block with a function that takes two inputs and additional keyword arguments:
def myfun(u1, u2, param1=1, param2=2, param3=3, param4=4): pass func = bd.FUNCTION(myfun, nin=2, kwargs=dict(param2=7, param3=8))
A block with two inputs and two outputs, the outputs are defined by two lambda functions with the same inputs:
FUNCTION( [ lambda x, y: x_t, lambda x, y: x* y])
A block with two inputs and two outputs, the outputs are defined by a single function which returns a list:
def myfun(u1, u2): return [ u1+u2, u1*u2 ] func = bd.FUNCTION( myfun, nin=2, nout=2)
- __init__(func=None, nin=1, nout=1, persistent=False, fargs=None, fkwargs=None, **blockargs)[source]
- Parameters:
func (callable or sequence of callables, optional) – function or lambda, or list thereof, defaults to None
nin (int, optional) – number of inputs, defaults to 1
nout (int, optional) – number of outputs, defaults to 1
persistent (bool, optional) – pass in a reference to a dictionary instance to hold persistent state, defaults to False
fargs (list, optional) – extra positional arguments passed to the function, defaults to []
fkwargs (dict, optional) – extra keyword arguments passed to the function, defaults to {}
blockargs (dict, optional) –
common block options
- class bdsim.blocks.functions.Gain(K=1, premul=False, **blockargs)[source]
Bases:
FunctionBlockGAIN

Gain block.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
int, float, ndarray
\(x\)
Output
0
int, float, ndarray
\(K x\)
Either or both the input and gain can be Numpy arrays and Numpy will compute the appropriate product \(u K\).
If \(u\) and
Kare both NumPy arrays the@operator is used and \(u\) is postmultiplied by the gain. To premultiply by the gain, to compute \(K u\) use thepremuloption.For example:
gain = bd.GAIN(2.5)
- __init__(K=1, premul=False, **blockargs)[source]
- Parameters:
K (scalar, array_like) – The gain value, defaults to 1
premul (bool, optional) – premultiply by constant, default is postmultiply, defaults to False
blockargs (dict) –
common block options
- class bdsim.blocks.functions.Interpolate(x=None, y=None, xy=None, time=False, kind='linear', **blockargs)[source]
Bases:
FunctionBlockINTERPOLATE

Interpolate signal.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
int, float
\(x\)
Output
0
float
\(f(x)\)
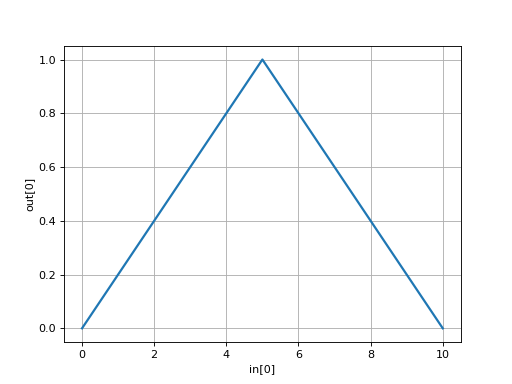
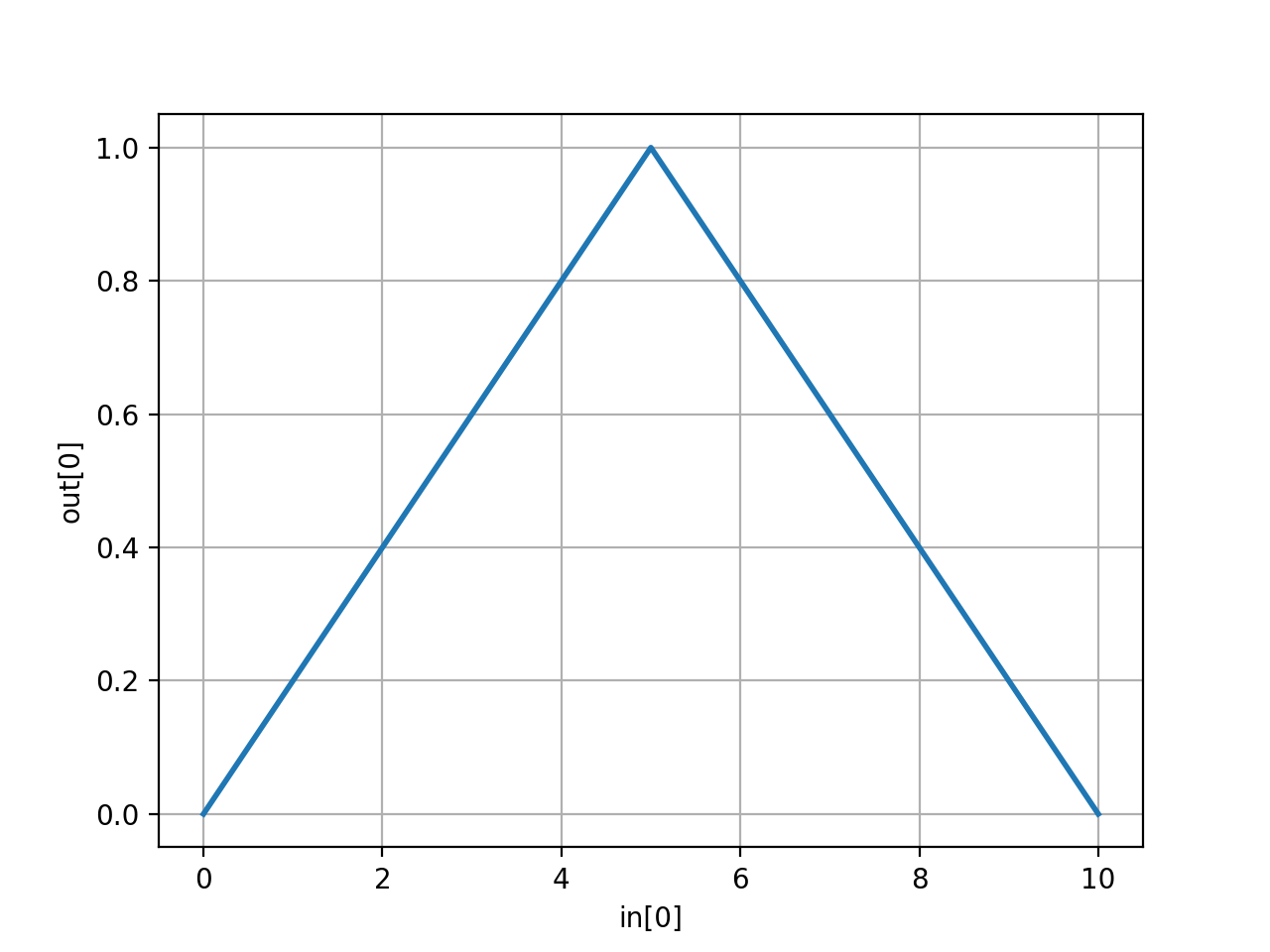
Interpolate a scalar function of a scalar.
A simple triangle function with domain [0,10] and range [0,1] can be defined by:
interp = bd.INTERPOLATE(x=(0,5,10), y=(0,1,0))
We might also express this as a list of 2D-coordinates:
interp = bd.INTERPOLATE(xy=[(0,0), (5,1), (10,0)])
(
Source code,png,hires.png,pdf)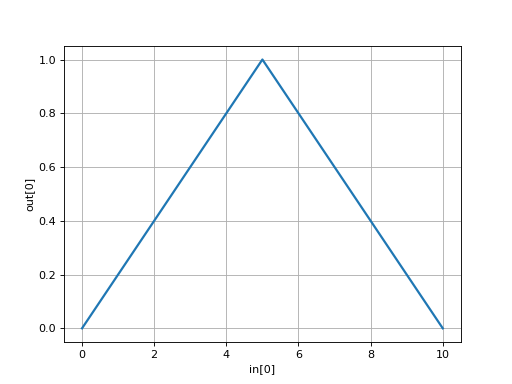
The data can also be expressed as Numpy arrays. If that is the case, the interpolation function can be vector valued.
xhas a shape of (N,1) andyhas a shape of (N,M). Alternativelyxyhas a shape of (N,M+1) and the first column is the x-data.- Note:
if
time=Truethen the block has no input ports and acts as aSourcenot aFunctionblock.- Seealso:
scipy.interpolate.interp1d()
- __init__(x=None, y=None, xy=None, time=False, kind='linear', **blockargs)[source]
- Parameters:
x (array_like, shape (N,) optional) – x-values of function, defaults to None
y (array_like, optional) – y-values of function, defaults to None
xy (array_like, optional) – combined x- and y-values of function, defaults to None
time (bool, optional) – x new is simulation time, defaults to False
kind (str, optional) – interpolation method, defaults to ‘linear’
blockargs (dict) –
common block options
{kind=link}
{kind=link}
- class bdsim.blocks.functions.Pow(p=1, matrix=False, **blockargs)[source]
Bases:
FunctionBlockPOW

Power block.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
int, float, ndarray
\(x\)
Output
0
int, float, ndarray
\(x^p\)
If the input is a Numpy array the result depends on
matrix. Ifmatrixis False the block performs an elementwise exponentiation and the result is a Numpy array of the same size.If
matrixis True and the input is a square matrix andpis an integer then matrixwise exponentiation is performedand using repeated matrix multiplication and matrix inversion. Ifpis not an integer it uses SciPy to compute the power using an eigenvalue decomposition.For example:
pow = bd.POW(2)
- __init__(p=1, matrix=False, **blockargs)[source]
- Parameters:
p (scalar) – The exponent value, defaults to 1
matrix (bool, optional) – premultiply by constant, default is postmultiply, defaults to False
blockargs (dict) –
common block options
- class bdsim.blocks.functions.Prod(ops='**', matrix=False, **blockargs)[source]
Bases:
FunctionBlockPROD

Product junction.
- Inputs:
N
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
i
int, float, ndarray
\(x_i\)
Output
0
int, float, ndarray
\(\prod_i \{x_i | \frac{1}{x_i}\}\)
Multiply or divide input signals according to the
opsstring. The number of input ports is the length of this string.For example:
prod = PROD('*/*')
is a 3-input product junction which computes
in[0] / in[1] * in[2].- Note:
By default the
*and/operators are used which perform element-wise operations.- Note:
The option
matrixwill instead use@and@ np.linalg.inv(). The shapes of matrices must conform. A matrix on a/input must be square and non-singular. Matrices are multiplied in ascending port order.
- class bdsim.blocks.functions.Sum(signs='++', mode=None, **blockargs)[source]
Bases:
FunctionBlockSUM

Summing junction.
- Inputs:
N
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
i
int, float, ndarray
\(x_i\)
Output
0
int, float, ndarray
\(\sum_i \pm x_i\)
Add or subtract input signals according to the
signsstring. The number of input ports is the length of this string.For example:
sum = bd.SUM('+-+')
is a 3-input summing junction which computes
in[0] - in[1] + in[2].- Note:
The signals must be compatible for addition, and if some are arrays they must be broadcastable.
- __init__(signs='++', mode=None, **blockargs)[source]
- Parameters:
signs (str, optional) – a string comprising
+or-characters, defaults to++mode (str, optional) – controls addition mode, per element, string comprises
rorcorCorL, defaults to Noneblockargs (dict) –
common block options
For example the string
+-creates a 2-port block where the second input is subtracted from the first.modecontrols how elements of the input vectors are added/subtracted. Elements which are angles must be treated specially, and this is indicated by the corresponding characters inmode. The string’s length must equal the width of the input vectors. The characters of the string can be:mode character
purpose
r
real number, don’t wrap (default)
c
angle on circle, wrap to [-π, π)
C
angle on circle, wrap to [0, 2π)
L
colatitude angle, wrap to [0, π]
For example if
mode="rc"then a 2-element array would have its second element wrapped to the range [-π, π).
Linear algebra
Linear algebra blocks:
have inputs and outputs
have no state variables
are a subclass of
FunctionBlock→Block
- class bdsim.blocks.linalg.Cond(**blockargs)[source]
Bases:
FunctionBlockCOND

Matrix condition number.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mbox{cond}(\mathbf{A})\)
- Seealso:
- __init__(**blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
- class bdsim.blocks.linalg.Det(**blockargs)[source]
Bases:
FunctionBlockDET

Matrix determinant.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mbox{det}(\mathbf{A})\)
Compute the matrix determinant.
- Seealso:
- __init__(**blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
- class bdsim.blocks.linalg.Flatten(order='C', **blockargs)[source]
Bases:
FunctionBlockFLATTEN

Flatten a multi-dimensional array.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mbox{vec}(\mathbf{A})\)
Flattens the incoming array in either row major (‘C’) or column major (‘F’) order.
- Seealso:
- __init__(order='C', **blockargs)[source]
- Parameters:
order (str) – flattening order, either “C” or “F”, defaults to “C”
blockargs (dict) –
common block options
- class bdsim.blocks.linalg.Inverse(pinv=False, **blockargs)[source]
Bases:
FunctionBlockINVERSE

Matrix inverse.
- Inputs:
1
- Outputs:
2
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mathbf{A}^{-1}\)
Output
1
float
\(\mbox{cond}(\mathbf{A})\)
Compute inverse of the 2D-array input signal. If the matrix is square the inverse is computed unless the
pinvflag is True. For a non-square matrix the pseudo-inverse is used. The condition number is output on the second port.- __init__(pinv=False, **blockargs)[source]
- Parameters:
pinv (bool, optional) – force pseudo inverse, defaults to False
blockargs (dict) –
common block options
- onames = ('inv', 'cond')
- class bdsim.blocks.linalg.Norm(ord=None, axis=None, **blockargs)[source]
Bases:
FunctionBlockNORM

Array norm.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\|\mathbf{A}\|\)
Computes the specified norm for a 1D- or 2D-array.
- Seealso:
- class bdsim.blocks.linalg.Slice1(index, **blockargs)[source]
Bases:
FunctionBlockSLICE1

Slice out subarray of 1D-array.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(v\)
Output
0
ndarray
\(v_{i\dots j}\)
Compute a 1D slice of input 1D array.
If
indexisNoneit means all elements.If
indexis a list, perform NumPy fancy indexing, returning the specified elementsExample:
slice = bd.SLICE1(index=[2,3]) # return elements 2 and 3 as a 1D array slice = bd.SLICE1(index=[2]) # return element 2 as a 1D array slice = bd.SLICE1(index=2) # return element 2 as a NumPy scalar
If
indexis a tuple, it must have three elements. It describes a Python slice(start, stop, step)where any element can beNonestart=Nonemeans start at first elementstop=Nonemeans finish at last elementstep=Nonemeans step by one
rows=Noneis equivalent torows=(None, None, None).Example:
slice = bd.SLICE1(index=(None,None,2)) # return every second element slice = bd.SLICE1(index=(None,None,-1)) # reverse the elements
- Seealso:
- __init__(index, **blockargs)[source]
- Parameters:
index (tuple(3)) – slice, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.linalg.Slice2(rows=None, cols=None, **blockargs)[source]
Bases:
FunctionBlockSLICE2

Slice out subarray of 2D-array.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mathbf{A}_{i\ldots j, m\ldots n}\)
Compute a 2D slice of input 2D array.
If
rowsorcolsisNoneit means all rows or columns respectively.If
rowsorcolsis a list, perform NumPy fancy indexing, returning the specified rows or columnsExample:
slice = bd.SLICE2(rows=[2,3]) # return rows 2 and 3, all columns slice = bd.SLICE2(cols=[4,1]) # return columns 4 and 1, all rows slice = bd.SLICE2(rows=[2,3], cols=[4,1]) # return elements [2,4] and [3,1] as a 1D array
If a single row or column is selected, the result will be a 1D array
If
rowsorcolsis a tuple, it must have three elements. It describes a Python slice(start, stop, step)where any element can beNonestart=Nonemeans start at first elementstop=Nonemeans finish at last elementstep=Nonemeans step by one
rows=Noneis equivalent torows=(None, None, None).Example:
slice = bd.SLICE2(rows=(None,None,2)) # return every second row slice = bd.SLICE2(cols=(None,None,-1)) # reverse the columns
The list and tuple notation can be mixed, for example, one for rows and one for columns.
- Seealso:
Slice1Index
- class bdsim.blocks.linalg.Transpose(**blockargs)[source]
Bases:
FunctionBlockTRANSPOSE

Matrix transpose.
- Inputs:
1
- Outputs:
2
- States:
0
Port type
Port number
Types
Description
Input
0
ndarray
\(\mathbf{A}\)
Output
0
ndarray
\(\mathbf{A}^{\top}\)
Compute transpose of the 2D-array input signal.
Note
An input 1D-array of shape (N,) is turned into a 2D-array column vector with shape (N,1).
An input 2D-array column vector of shape (N,1) becomes a 2D-array row vector with shape (1,N).
- Seealso:
numpy.linalg.transpose()
- __init__(**blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
Spatial math
- class bdsim.blocks.spatial.Pose_inverse(**blockargs)[source]
Bases:
FunctionBlockPOSE_INVERSE

Pose inverse.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
SEn, SOn
\(\xi\)
Output
0
SEn, SOn
\(\ominus \xi\)
Invert the pose on the input port.
- __init__(**blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
- class bdsim.blocks.spatial.Pose_postmul(pose=None, **blockargs)[source]
Bases:
FunctionBlockPOSE_POSTMUL

Post multiply pose.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
SEn, SOn
\(\xi\)
Output
0
SEn, SOn
\(\xi \oplus \xi_c\)
Postmultiply the input pose by a constant pose.
Note
Pose objects must be of the same type.
- Seealso:
- __init__(pose=None, **blockargs)[source]
- Parameters:
pose (SO2, SE2, SO3 or SE3) – pose to apply
blockargs (dict) –
common block options
- class bdsim.blocks.spatial.Pose_premul(pose=None, **blockargs)[source]
Bases:
FunctionBlockPOSE_PREMUL

Pre multiply pose.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
SEn, SOn
\(\xi\)
Output
0
SEn, SOn
\(\xi_c \oplus \xi\)
Premultiply the input pose by a constant pose.
Note
Pose objects must be of the same type.
- Seealso:
- __init__(pose=None, **blockargs)[source]
- Parameters:
pose (SO2, SE2, SO3 or SE3) – pose to apply
blockargs (dict) –
common block options
- class bdsim.blocks.spatial.Transform_vector(**blockargs)[source]
Bases:
FunctionBlockTRANSFORM_VECTOR

Transform a vector.
- Inputs:
2
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
SEn, SOn
\(\xi\)
Input
1
ndarray
\(v\), Euclidean 2D or 3D
Output
0
ndarray
\(\xi \bullet v\)
Linearly transform the input vector by the input pose.
- __init__(**blockargs)[source]
- Parameters:
blockargs (dict) –
common block options
Connection blocks
Connection blocks are in two categories:
- Signal manipulation:
have inputs and outputs
have no state variables
are a subclass of
FunctionBlock→Block
- Subsystem support
have inputs or outputs
have no state variables
are a subclass of
SubsysytemBlock→Block
- class bdsim.blocks.connections.DeMux(nout=1, **blockargs)[source]
Bases:
FunctionBlockDEMUX

Demultiplex signals.
- Inputs:
1
- Outputs:
N
- States:
0
Port type
Port number
Types
Description
Input
0
iterable
\(x\)
Output
i
any
\(x_i\)
This block has a single input port and
noutoutput ports. The input signal is an iterable whosenoutelements are routed element-wise to individual scalar output ports. If the input is a 1D Numpy array, then each output port is an element of that array.- Seealso:
- __init__(nout=1, **blockargs)[source]
- Parameters:
nout (int, optional) – number of outputs, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.connections.Dict(keys, **blockargs)[source]
Bases:
FunctionBlockDICT

Create a dictionary signal.
- Inputs:
N
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
Output
0
dict
{key: x[i] for i, key in enumerate(keys)}Inputs are assigned to a dictionary signal, using the corresponding names from
keys. For example:dd = bd.DICT(["x", "xd", "xdd"])
expects three inputs and assigns them to dictionary items
x,xd,xddof the output dictionary respectively.This is somewhat like a multiplexer
Muxbut allows for named heterogeneous data. A dictionary signal can serve a similar purpose to a “bus” in Simulink(R).- __init__(keys, **blockargs)[source]
- Parameters:
keys (list) – list of dictionary keys
blockargs (dict) –
common block options
- class bdsim.blocks.connections.InPort(nout=1, **blockargs)[source]
Bases:
FunctionBlockINPORT

Input ports for a subsystem.
- Inputs:
0
- Outputs:
N
- States:
0
Port type
Port number
Types
Description
Output
j
any
\(y_j\)
This block connects a subsystem to a parent block diagram. Inputs to the parent-level
SubSystemblock appear as the outputs of this block.Note
Only one
INPORTblock can appear in a block diagram but it can have multiple ports. This is different to Simulink(R) which would require multiple single-port input blocks.- __init__(nout=1, **blockargs)[source]
- Parameters:
nout (int, optional) – Number of output ports, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.connections.Index(index=None, **blockargs)[source]
Bases:
FunctionBlockINDEX

- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
i
iterable
\(x\)
Output
j
iterable
\(x_i\)
The specified element(s) of the input iterable (list, string, etc.) are output. The index can be an integer, sequence of integers, a Python slice object, or a string with Python slice notation, eg.
"::-1".- Seealso:
Slice1Slice2
- class bdsim.blocks.connections.Item(item, **blockargs)[source]
Bases:
FunctionBlockITEM

Select item from a dictionary signal.
- Inputs:
1
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
0
dict
DOutput
0
any
D[i]For a dictionary type input signal, select one item as the output signal. For example:
item = bd.ITEM("xd")
selects the
xditem from the dictionary signal input to the block.This is somewhat like a demultiplexer
DeMuxbut allows for named heterogeneous data. A dictionary signal can serve a similar purpose to a “bus” in Simulink(R).- Seealso:
- __init__(item, **blockargs)[source]
- Parameters:
item (str) – name of dictionary item
blockargs (dict) –
common block options
- class bdsim.blocks.connections.Mux(nin=1, **blockargs)[source]
Bases:
FunctionBlockMUX

Multiplex signals.
- Inputs:
N
- Outputs:
1
- States:
0
Port type
Port number
Types
Description
Input
i
float, ndarray
\(x_i\)
Output
0
ndarray
\([x_0 \ldots x_{N-1}]\)
This block takes a number of scalar or 1D-array signals and concatenates them into a single 1-D array signal. For example:
mux = bd.MUX(2)
- Seealso:
DemuxDict
- __init__(nin=1, **blockargs)[source]
- Parameters:
nin (int, optional) – Number of input ports, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.connections.OutPort(nin=1, **blockargs)[source]
Bases:
FunctionBlockOUTPORT

Output ports for a subsystem.
- Inputs:
N
- Outputs:
0
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
This block connects a subsystem to a parent block diagram. The inputs of this block become the outputs of the parent-level
SubSystemblock.Note
Only one
OUTPORTblock can appear in a block diagram but it can have multiple ports. This is different to Simulink(R) which would require multiple single-port output blocks.- __init__(nin=1, **blockargs)[source]
- Parameters:
nin (int, optional) – Number of input ports, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.connections.SubSystem(subsys, nin=1, nout=1, allow_eval=None, trace_eval=False, globalvars=None, **blockargs)[source]
Bases:
SubsystemBlockSUBSYSTEM

Instantiate a subsystem.
- Inputs:
N
- Outputs:
M
- States:
0
Port type
Port number
Types
Description
Input
i
any
\(x_i\)
Output
j
any
\(y_j\)
This block represents a subsystem in a block diagram. The definition of the subsystem can be:
a path to a
.bdJSON model file, which is loaded viabdload(), orthe name of a Python module which is imported and must create exactly one
BlockDiagraminstance, ora
BlockDiagraminstance
Warning
Module name mode (non-
.bdstring): importing a module executes all top-level Python code in that file. Only use this with modules you trust completely.File mode (
.bdpath): loads a JSON file safely.eval()is only used for parameters starting with"="; control this withallow_eval.The referenced block diagram must contain either or both of:
one
InPortblock, which has outputs but no inputs. These outputs are connected to the inputs to the enclosingSubSystemblock.one
OutPortblock, which has inputs but no outputs. These inputs are connected to the outputs to the enclosingSubSystemblock.
Note
The referenced block diagram is treated like a macro and copied into the parent block diagram at compile time. The
SubSystem,InPortandOutPortblocks are eliminated, that is, all hierarchical structure is lost.The same subsystem can be used multiple times, its blocks and wires will be cloned. Subsystems can also include subsystems.
The number of input and output ports is not specified, they are computed from the number of ports on the
InPortandOutPortblocks within the subsystem.
- __init__(subsys, nin=1, nout=1, allow_eval=None, trace_eval=False, globalvars=None, **blockargs)[source]
- Parameters:
subsys (str or BlockDiagram) – Subsystem as a
.bdfilepath, module name, orBlockDiagraminstancenin (int, optional) – Number of input ports, defaults to 1
nout (int, optional) – Number of output ports, defaults to 1
allow_eval (bool, optional) – (
.bdmode only)Trueenables eval silently,Falserefuses=...expressions,None(default) warns once.trace_eval (bool, optional) – (
.bdmode only) print each expression before evaluation.globalvars (dict, optional) – (
.bdmode only) extra names available when evaluating"=..."parameter expressions.blockargs (dict) –
common block options
- Raises:
ImportError – module not found or no BlockDiagram in it
ValueError – invalid argument type or .bd load constraints not met
Continuous-time dynamics
Continuous-time blocks:
have inputs and outputs
have state variables
are a subclass of
ContinuousBlock→Block
- class bdsim.blocks.continuous.Deriv(alpha, x0=0, y0=None, gain=1.0, **blockargs)[source]
Bases:
SubsystemBlockDERIV

Continuous-time derivative.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float
\(x\)
Output
0
float
\(y\)
Implements the dynamics of a derivative filter, but to be causal (proper) it includes a first-order low-pass filter. The dynamics is
\[\frac{s}{\frac{s}{\alpha} + 1}\]The pole is at \(s=-\alpha\). A small value of
alphacorresponds to a long-time constant in the step reponse. The parameteralphacan be used to achieve the desired tradeoff between noise reduction and phase lag.The derivative calculation is performed using a complementary filter, implemented as a subsystem with an integrator and a feedback loop. The initial state of the integrator is given by
x0:+ u ───> SUM ───────> GAIN(alpha) ──┬───> GAIN(k) ───> y ▲ ─ │ │ │ └─── INTEGRATOR(x0) <────┘If the initial output of the derivative block is known it can be provided as
y0from whichx0is calculated by \(x_0 = - \alpha y_0\).The final GAIN block is only included if
gainis not 1.0, and can be used to scale the output of the derivative block.Warning
This derivative block has a direct feedthrough term, and depending on how it is used in a system it may introduce an an algebraic loop which will be flagged at
compiletime. TheDeriv2blockis an alternative implementation without direct feedthrough and includes a second-order filter which may be more suitable for some applications.Changed in version 1.2.0: The pole is now at \(s=-\alpha\) instead of \(s=-1/\alpha\).
- Seealso:
- __init__(alpha, x0=0, y0=None, gain=1.0, **blockargs)[source]
- Parameters:
alpha (float) – filter pole in units of rad/s
x0 (array_like, optional) – initial states, defaults to 0
y0 (array_like) – inital outputs
gain (float, optional) – gain or scaling factor, defaults to 1
blockargs (dict) –
common block options
- class bdsim.blocks.continuous.Deriv2(wn, unit='rad/s', zeta=1, x0=(0, 0), gain=1.0, **blockargs)[source]
Bases:
LTI_SSDERIV2

Continuous-time derivative with second-order filter.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float
\(x\)
Output
0
float
\(y\)
Implements the dynamics of a derivative filter, but to be causal it includes a second-order low-pass filter. The dynamics are
\[\frac{Y(s)}{U(s)} = \frac{s}{s^2 + 2\omega_n \zeta s + \omega_n^2}\]It is implemented in state-space form using an
LTI_SSblock. The state-space model is in observer canonical form, with the state vector being the output of the first and second integrators in the chain. The initial state of the integrators is given byx0. The initial output of the derivative block is given byx0[0].- Seealso:
- __init__(wn, unit='rad/s', zeta=1, x0=(0, 0), gain=1.0, **blockargs)[source]
- Parameters:
wn (float) – natural frequency in units of rad/s
unit (str, optional) – units of wn, defaults to “rad/s”
zeta (float, optional) – damping ratio, defaults to 1
x0 (array_like, optional) – initial states, defaults to (0, 0)
gain (float, optional) – gain or scaling factor, defaults to 1
blockargs (dict) –
common block options
Damping factor defaults to critical damping, which results in the fastest response without overshoot. A smaller value of
zetaresults in a faster response but with overshoot, while a larger value results in a slower response with no overshoot. Choosezeta=0.707(\(1/\sqrt{2}\)) for optimal rise time and overshoot (4.3%).
- class bdsim.blocks.continuous.Integrator(x0=0, gain=1.0, min=None, max=None, **blockargs)[source]
Bases:
ContinuousBlockINTEGRATOR

Continuous-time integrator.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float, ndarray
\(x\)
Output
0
any
\(y\)
This block implements the dynamics of a continuous-time integrator with gain \(k\), which is given by
\[\begin{split}\begin{aligned} x(t) &= k \int_0^T u(t) \, dt \\ y(t) &= x(t) \end{aligned}\end{split}\]The state can be a scalar or a vector. The initial state, and type, is given by
x0. The shape of the input signal must matchx0.The minimum and maximum output values can be:
a scalar, in which case the same value applies to every element of the state vector, or
a vector, of the same shape as
x0that applies elementwise to the state.
Note
The minimum and maximum prevent integration outside the limits, but assume that the initial state is within the limits.
Integration can be controlled by an
enablefunction:enable(t, u, x): bool
where the arguments are current time, a list of inputs to the integrator block and the state as an ndarray. If the function returns False then the integrator’s state is set to zero.
- Seealso:
- __init__(x0=0, gain=1.0, min=None, max=None, **blockargs)[source]
- Parameters:
x0 (array_like, optional) – Initial state, defaults to 0
gain (float) – gain or scaling factor, defaults to 1
min (float or array_like, optional) – Minimum value of state, defaults to None
max (float or array_like, optional) – Maximum value of state, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.continuous.LTI_SISO(N=1, D=[1, 1], x0=None, form='ccf', order='backward', verbose=False, **blockargs)[source]
Bases:
LTI_SSLTI_SISO

Continuous-time SISO LTI dynamics.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float
\(u\)
Output
0
float
\(y\)
Implements the dynamics of a continuous-time single-input single-output (SISO) linear time invariant (LTI) system described by numerator and denominator polynomial coefficients. The dynamics are given by
\[\frac{Y(s)}{U(s)} = \frac{N(s)}{D(s)}\]Coefficients are given in the order from highest order to zeroth order, ie. \(2s^2 - 4s +3\) is
[2, -4, 3], \(s^3\) is[1, 0, 0, 0].The state-space form can be either controller canonical form or observer canonical form, as specified by the
formargument.Examples:
lti = bd.LTI_SISO(N=[1, 2], D=[2, 3, -4])
is the transfer function \(\frac{s+2}{2s^2+3s-4}\).
Note
The state-space realization is not unique. The controller canonical form is more common in control design, while the observer canonical form is more common in estimation.
The state ordering convention (the direction of the integrator chain) can be specified by the
orderargument, and results in either 1s on the super-diagonal or sub-diagonal of the A matrix for the controller canonical form.
- __init__(N=1, D=[1, 1], x0=None, form='ccf', order='backward', verbose=False, **blockargs)[source]
- Parameters:
N (array_like) – Numerator coefficients in descending powers of \(s\).
D (array_like) – Denominator coefficients in descending powers of \(s\). Does not have to be normalized.
form (str, optional) – The canonical form of the realization, defaults to ‘ccf’.
order (str, optional) – The state ordering convention
verbose (bool, optional) – If True, print the state-space matrices, defaults to False
- Returns:
LTI_SISO block
- Return type:
LTI_SISOinstance
Coefficients
NandDcan be specified in the form of an array of coefficients, or an array of factors. The coefficients and factors are arrays of coefficients in decreasing powers of \(s\). For example:[1, 2]is the polynomial \(s+2\),[[1, 1], [1, 2]]is the factors \((s+1)(s+2)\) which are convolved to obtain the coefficients of \(s^2 + 3s + 2\).[2,[1,1], [1,2]]is the factors \(2(s+1)(s+2)\) which are convolved to obtain the coefficients of \(2s^2 + 6s + 4\)
The
formof the realization can be one of:'ccf'Controller Canonical Form. The characteristic equationcoefficients appear in a row of A. Useful for control design.
'ocf'Observer Canonical Form. The characteristic equationcoefficients appear in a column of A. Useful for estimation.
The
orderof the integrator chain can be one of:'forward'\(x_0\) is the output of the first integrator,\(x_n-1\) is the last. Results in 1s on the super-diagonal for
'ccf'.
'backward': \(x_n-1\) is the output of the first integrator,\(x_0\) is the last. Results in 1s on the sub-diagonal for
'ccf'.
Note
The transfer function is assumed to be strictly proper (\(deg(N) < deg(D)\)).
The default
form='ccf', order='backward'corresponds to the state-space realization returned byscipy.signal.tf2ssand MATLAB’stf2ss.The state-space matrices are available in the
A,B,C, andDattributes of the block.If D is zero, then the block has no feedthrough and the D matrix is set to None. If D is nonzero, then the block has feedthrough and the D matrix is stored in the D attribute.
The
_feedthroughattribute of the block is set to True if D is nonzero. This can be used to check for feedthrough without having to check the D matrix directly, and is used by the scheduler to ensure correct block evaluation order.
- class bdsim.blocks.continuous.LTI_SS(A, B, C, D=None, x0=None, **blockargs)[source]
Bases:
ContinuousBlockLTI_SS

Continuous-time state-space LTI dynamics
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float, ndarray
\(u\)
Output
0
float, ndarray
\(y\)
Implements the dynamics of a continuous-time multi-input multi-output (MIMO) linear time invariant (LTI) system described in statespace form. The dynamics are given by
\[\begin{split}\begin{aligned} \dot{x} &= A x + B u \\ y &= C x \end{aligned}\end{split}\]A direct passthrough component, typically \(D\), is not allowed in order to avoid algebraic loops.
Examples:
lti = bd.LTI_SS(A=-2, B=1, C=-1)
is the system \(\dot{x}=-2x+u, y=-x\).
- __init__(A, B, C, D=None, x0=None, **blockargs)[source]
- Parameters:
N (array_like, optional) – numerator coefficients, defaults to 1
A (array_like, optional) – system matrix, defaults to [1,1]
B (array_like, optional) – input matrix, defaults to [1]
C (array_like, optional) – output matrix, defaults to [1]
D (array_like, optional) – feedthrough matrix, defaults to None
x0 (array_like, optional) – initial states, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.continuous.PID(P=0.0, I=0.0, D=0.0, D_pole=1, I_limit=None, structure='parallel', **blockargs)[source]
Bases:
SubsystemBlockPID

Continuous-time PID control.
- Inputs:
2
- Outputs:
1
- States:
2
Port type
Port number
Types
Description
Input
0
float
\(x\), plant output
Input
1
float
\(x^*\), demanded output
Output
0
any
\(u\), control to plant
Implements the dynamics of a continuous-timePID controller as a
bdsimsubsystem. There are three possible structures:Parallel structure:
┌───> P ──────┐ │ │ │ ▼ e ────┼───> Ds ──> SUM ───> y │ ▲ │ │ └───> I/s ────┘
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(s)}{E(s)} &= P + \frac{I}{s} + D s \end{aligned}\end{split}\]Ideal or standard structure. Described by ANSI/ISA-S75:
┌─────────────┐ │ │ │ ▼ e ────> P ──┼───> Ds ──> SUM ───> y │ ▲ │ │ └───> I/s ────┘
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(s)}{E(s)} &= P \left(1 + \frac{I}{s} + D s\right) \end{aligned}\end{split}\]Series structure. Archaic form, essentially a PI controller followed by a PD controller:
┌──────────────┐ ┌─────────────┐ │ │ │ │ │ ▼ │ ▼ e ────> P ──┴──> I/s ───> SUM ──┴──> Ds ──> SUM ───> y
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(s)}{E(s)} &= P \left(1 + \frac{I}{s}\right)\left(1 + D s\right) \end{aligned}\end{split}\]Sometimes the gains are written in terms of time constants \(T_i = 1/I\) and \(Td = D\).
The PID controller is a subsytem comprising a number of blocks. If the I or D gains are zero then a PD or PI controller will be created with fewer blocks.
The gain equivalence between the three structures is given by
structure
\(P\)
\(I\)
\(D\)
parallel
\(P_p\)
\(I_p\)
\(D_p\)
ideal
\(P_i\)
\(P_i I_i\)
\(P_i D_i\)
series
\(P_s (1 + D_s I_s)\)
\(P_s I_s\)
\(P_s D_s\)
The derivative is computed by a DERIV block which implements a first-order system
\[\frac{s}{s/a + 1}\]where the real pole \(a=\)
-D_filtcan be positioned appropriately.If
I_limitis provided it specifies the limits of the integrator output. The integrator state is clipped to these limits, which can be used to prevent integrator windup. The limits can be specified as:a scalar \(a\) the integrator state is clipped to the interval \([-a, a]\)
a 2-tuple \((a,b)\) the integrator state is clipped to the interval \([a, b]\)
Examples:
pid = bd.PID(P=3, D=2, I=1)
- ..note:: The result is a subsystem which will be expanded into 12 blocks for the
PID case, fewer for the PI or PD cases.
Warning
This block has a direct feedthrough term (by definition), and depending on how it is used in a system it may introduce an an algebraic loop which will be flagged at
compiletime.Changed in version 1.2.0: The pole is now at
-D_poleinstead of-1/D_pole.- Seealso:
- __init__(P=0.0, I=0.0, D=0.0, D_pole=1, I_limit=None, structure='parallel', **blockargs)[source]
- Parameters:
type (str, optional) – the controller type, defaults to “PID”
P (float) – proportional gain, defaults to 0
D (float) – derivative gain, defaults to 0
I (float) – integral gain, defaults to 0
D_pole (float) – filter pole for derivative estimate, defaults to 1 rad/s
I_limit (float or 2-tuple) – integral limit
structure (
str) – the structure of the PID implementation, “parallel” (default), “series”, “standard|ideal”blockargs (dict) –
common block options
- class bdsim.blocks.continuous.PoseIntegrator(x0=None, **blockargs)[source]
Bases:
ContinuousBlockPOSEINTEGRATOR

Continuous-time pose integrator
- Inputs:
1
- Outputs:
1
- States:
6
Port type
Port number
Types
Description
Input
0
ndarray(6,)
\(x\)
Output
0
SE3
\(y\)
This block integrates spatial velocity over time. The block input is a spatial velocity as a 6-vector \((v_x, v_y, v_z, \omega_x, \omega_y, \omega_z)\) and the output is pose as an
SE3instance.Note
The state vector is a velocity twist.
- __init__(x0=None, **blockargs)[source]
- Parameters:
x0 (SE3, Twist3, optional) – Initial pose, defaults to null
blockargs (dict) –
common block options
Sampled-time dynamics
Sampled-time blocks:
have inputs and outputs
have discrete-time state variables that are sampled/updated at the times specified by the associated clock
are a subclass of
SampledBlock→Block
- class bdsim.blocks.sampled.DIntegrator(*args, **kwargs)[source]
Bases:
Integrator_SDeprecated: use
Integrator_Sinstead.- __init__(*args, **kwargs)
- Parameters:
clock (Clock) – clock source
x0 (array_like, optional) – Initial state, defaults to 0
gain (float) – gain or scaling factor, defaults to 1
min (float or array_like, optional) – Minimum value of state, defaults to None
max (float or array_like, optional) – Maximum value of state, defaults to None
enable (callable) – function to enable or disable integration
blockargs (dict) –
common block options
- class bdsim.blocks.sampled.DPoseIntegrator(*args, **kwargs)[source]
Bases:
PoseIntegrator_SDeprecated: use
PoseIntegrator_Sinstead.- __init__(*args, **kwargs)
- Parameters:
clock (Clock) – clock source
x0 (SE3, optional) – Initial pose, defaults to null
blockargs (dict) –
common block options
- class bdsim.blocks.sampled.Deriv_S(clock, x0=0, gain=1.0, **blockargs)[source]
Bases:
SampledBlockDERIV_S

Discrete-time derivative.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float
\(x\)
Output
0
float
\(y\)
Implements the dynamics of a derivative filter, but to be causal (proper) it includes a first-order low-pass filter. The dynamics are
\[\frac{1 - z^{-1}}{T}\]where \(T\) is the sampling time.
Unlike the continuous-time derivative blocks, this one includes no smoothing filter.
The initial output of the derivative block is given by the initial state
x0.Added in version 1.2.0.
- Seealso:
Integrator
- class bdsim.blocks.sampled.Integrator_S(clock, x0=0, gain=1.0, min=None, max=None, enable=None, **blockargs)[source]
Bases:
SampledBlockINTEGRATOR_S

Discrete-time integrator.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float, ndarray
\(x\)
Output
0
float, ndarray
\(y\)
This block implements the dynamics of a discrete-time integrator with gain \(k\), which is given by
\[\begin{split}\begin{aligned} x_{k+1} &= x_k + k \cdot u_k \cdot T \\ y_k &= x_k \end{aligned}\end{split}\]The state can be a scalar or a vector. The initial state, and type, is given by
x0. The shape of the input signal must matchx0.The minimum and maximum output values can be:
a scalar, in which case the same value applies to every element of the state vector, or
a vector, of the same shape as
x0that applies elementwise to the state.
Note
The minimum and maximum prevent integration outside the limits, but assume that the initial state is within the limits.
Integration can be controlled by an
enablefunction:enable(t, u, x): bool
where the arguments are current time, a list of inputs to the integrator block and the state as an ndarray. If the function returns False then the integrator’s state is set to zero.
- __init__(clock, x0=0, gain=1.0, min=None, max=None, enable=None, **blockargs)[source]
- Parameters:
clock (Clock) – clock source
x0 (array_like, optional) – Initial state, defaults to 0
gain (float) – gain or scaling factor, defaults to 1
min (float or array_like, optional) – Minimum value of state, defaults to None
max (float or array_like, optional) – Maximum value of state, defaults to None
enable (callable) – function to enable or disable integration
blockargs (dict) –
common block options
- class bdsim.blocks.sampled.LTI_SISO_S(clock, N=1, D=[1, 1], x0=None, form='ccf', order='backward', verbose=False, **blockargs)[source]
Bases:
LTI_SS_SLTI_SISO_S

Discrete-time SISO LTI dynamics.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float
\(u\)
Output
0
float
\(y\)
Implements the dynamics of a discrete-time single-input single-output (SISO) linear time invariant (LTI) system described by numerator and denominator polynomial coefficients. The dynamics are given by
\[\frac{Y(z)}{U(z)} = \frac{N(z)}{D(z)}\]Coefficients are given in the order from highest to lowest order, ie. \(2z^2 - 4z +3\) is
[2, -4, 3], \(1 - z^{-1} + 2 z^{-2}\) is[1, -1, 2].The state-space form can be either controller canonical form or observer canonical form, as specified by the
formargument. For eitherExamples:
lti = bd.LTI_SISO(N=[1, 2], D=[2, 3, -4])
is the transfer function \(\frac{s+2}{2s^2+3s-4}\).
Note
The state-space realization is not unique. The controller canonical form is more common in control design, while the observer canonical form is more common in estimation. The state ordering convention (the direction of the integrator chain) can be specified by the
orderargument, and results in either 1s on the super-diagonal or sub-diagonal of the A matrix for the controller canonical form.
Added in version 1.2.0.
- __init__(clock, N=1, D=[1, 1], x0=None, form='ccf', order='backward', verbose=False, **blockargs)[source]
- Parameters:
clock (Clock) – clock source
N (array_like) – Numerator coefficients in descending powers of \(s\).
D (array_like) – Denominator coefficients in descending powers of \(s\). Does not have to be normalized.
form (str, optional) – The canonical form of the realization, defaults to ‘ccf’.
order (str, optional) – The state ordering convention
verbose (bool, optional) – If True, print the state-space matrices, defaults to False
- Returns:
LTI_SISO_S block
- Return type:
LTI_SISO_Sinstance
Coefficients
NandD``can be specified in the form of an array of coefficients, or an array of factors. The coefficients and factors are arrays of coefficients in decreasing powers of :math:`z`, this could be :math:`z^2 + 0.8z + 0.15` or :math:`1 + 0.8z^{-1} + 0.15z^{-2}`, both represented as ``[1, 0.8, 0.15]. For example:[1, 0.8]is the polynomial \(z+0.8\),[[1, 0.3], [1, 0.5]]is the factors \((z+0.3)(z+0.5)\) which are convolved to obtain the coefficients of \(z^2 + 0.8z + 0.15\).[2,[1,0.3], [1,0.5]]is the factors \(2(z+0.3)(z+0.5)\) which are convolved to obtain the coefficients of \(2z^2 + 1.6z + 0.3\)
The
formof the realization can be one of:'ccf'Controller Canonical Form. The characteristic equationcoefficients appear in a row of A. Useful for control design.
'ocf'Observer Canonical Form. The characteristic equationcoefficients appear in a column of A. Useful for estimation.
The
orderof the integrator chain can be one of:'forward'\(x_0\) is the output of the first integrator,\(x_n-1\) is the last. Results in 1s on the super-diagonal for
'ccf'.
'backward': \(x_n-1\) is the output of the first integrator,\(x_0\) is the last. Results in 1s on the sub-diagonal for
'ccf'.
Note
Representation Perspectives:
1. Control Perspective (z-domain): If coefficients represent descending powers of \(z\), the states represent forward shifts.
Example: \(G(z) = \\frac{b_1 z + b_2}{z^2 + a_1 z + a_2}\)
2. DSP Perspective (z⁻¹-domain): If coefficients represent ascending powers of \(z^{-1}\), the states represent physical unit delays.
Example: \(H(z^{-1}) = \\frac{b_0 + b_1 z^{-1}}{1 + a_1 z^{-1} + a_2 z^{-2}}\)
In both cases, this function treats the input arrays as ordered coefficients.
\[\begin{split}x[k+1] = A x[k] + B u[k] \\\\ y[k] = C x[k] + D u[k]\end{split}\]If
form='ccf'andorder='forward', the state \(x_i[k]\) corresponds to the output of the \(i\)-th delay element in a tapped delay line.Note
The transfer function is assumed to be strictly proper (\(deg(N) < deg(D)\)).
The default
form='ccf', order='backward'corresponds to the state-space realization returned byscipy.signal.tf2ssand MATLAB’stf2ss.The state-space matrices are available in the
A,B,C, andDattributes of the block.If D is zero, then the block has no feedthrough and the D matrix is set to None. If D is nonzero, then the block has feedthrough and the D matrix is stored in the D attribute.
The
_feedthroughattribute of the block is set to True if D is nonzero. This can be used to check for feedthrough without having to check the D matrix directly, and is used by the scheduler to ensure correct block evaluation order.
- class bdsim.blocks.sampled.LTI_SS_S(clock, A, B, C, D=None, x0=None, **blockargs)[source]
Bases:
SampledBlockLTI_SS_S

Discrete-time state-space LTI dynamics
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float, ndarray
\(u\)
Output
0
float, ndarray
\(y\)
Implements the dynamics of a discrete-time multi-input multi-output (MIMO) linear time invariant (LTI) system described in statespace form. The dynamics are given by
\[\begin{split}\begin{aligned} x_{k+1} &= A x_k + B u_k \\ y_k &= C x_k \end{aligned}\end{split}\]A direct passthrough component, typically \(D\), is not allowed in order to avoid algebraic loops.
Examples:
lti = bd.LTI_SS_S(A=-2, B=1, C=-1)
is the system \(x_{k+1}=-2x_k+u_k, y_k=-x_k\).
Added in version 1.2.0.
- __init__(clock, A, B, C, D=None, x0=None, **blockargs)[source]
- Parameters:
clock (Clock) – clock source
A (array_like, optional) – system matrix, defaults to [1,1]
B (array_like, optional) – input matrix, defaults to [1]
C (array_like, optional) – output matrix, defaults to [1]
D (array_like, optional) – feedthrough matrix, defaults to None
x0 (array_like, optional) – initial states, defaults to None
blockargs (dict) –
common block options
- class bdsim.blocks.sampled.PID_S(clock, P=0.0, I=0.0, D=0.0, I_limit=None, I_band=None, structure='parallel', **blockargs)[source]
Bases:
SubsystemBlockPID_S

Discrete-time PID control.
- Inputs:
2
- Outputs:
1
- States:
2
Port type
Port number
Types
Description
Input
0
float
\(x\), plant output
Input
1
float
\(x^*\), demanded output
Output
0
any
\(u\), control to plant
Implements the dynamics of a discrete-timePID controller as a
bdsimsubsystem. There are three possible structures:Parallel structure:
┌───────> P ─────────┐ │ │ │ ▼ e ────┼───> D(z-1)/Tz ──> SUM ───> y │ ▲ │ │ └───> IT/(z-1) ──────┘
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(z)}{E(z)} &= P + I\frac{T}{z-1} + D\frac{z-1}{Tz} \end{aligned}\end{split}\]Ideal or standard structure. Described by ANSI/ISA-S75:
┌────────────────────┐ │ │ │ ▼ e ────> P ──┼───> D(z-1)/Tz ──> SUM ───> y │ ▲ │ │ └───> IT/(z-1) ──────┘
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(z)}{E(z)} &= P \left(1 + I\frac{T}{z-1} + D\frac{z-1}{Tz}\right) \end{aligned}\end{split}\]Series structure. Archaic form, essentially a PI controller followed by a PD controller:
┌───────────────────┐ ┌────────────────────┐ │ │ │ │ │ ▼ │ ▼ e ────> P ──┴──> IT/(z-1) ───> SUM ──┴──> D(z-1)/Tz ──> SUM ───> y
\[\begin{split}\begin{aligned} e &= x^* - x \\ \frac{Y(z)}{E(z)} &= P \left(1 + I\frac{T}{z-1} + D\frac{z-1}{Tz}\right) \end{aligned}\end{split}\]Sometimes the gains are written in terms of time constants \(T_i = 1/I\) and \(Td = D\).
The PID controller is a subsytem comprising a number of blocks. If the I or D gains are zero then a PD or PI controller will be created with fewer blocks.
The gain equivalence between the three structures is given by
structure
\(P\)
\(I\)
\(D\)
parallel
\(P_p\)
\(I_p\)
\(D_p\)
ideal
\(P_i\)
\(P_i I_i\)
\(P_i D_i\)
series
\(P_s (1 + D_s I_s)\)
\(P_s I_s\)
\(P_s D_s\)
The derivate is computed by a
DERIV_Sblock which is a simple first-order difference, which will exacerbate any noise on its input signal.The integration is performed by an
INTEGRATOR_Sblock, which has some options to limit the integrator state and to enable/disable integration based on the error signal.If
I_limitis provided it specifies the limits of the integrator state, before multiplication byI. IfI_limitis:a scalar \(a\) the integrator state is clipped to the interval \([-a, a]\)
a 2-tuple \((a,b)\) the integrator state is clipped to the interval \([a, b]\)
If
I_limitis provided it specifies the limits of the integrator output. The integrator state is clipped to these limits, which can be used to prevent integrator windup. The limits can be specified as:a scalar \(s\) the band is the interval \([-s, s]\)
a 2-tuple \((a,b)\) the band is the interval \([a, b]\)
If
I_bandis provided the integrator is reset to zero whenever the error \(e\) is outside the band given byI_bandwhich is:a scalar \(s\) the band is the interval \([-s, s]\)
a 2-tuple \((a,b)\) the band is the interval \([a, b]\)
Examples:
pid = bd.PID_S(P=3, D=2, I=1)
Warning
This block has a direct feedthrough term (by definition), and depending on how it is used in a system it may introduce an an algebraic loop which will be flagged at
compiletime.Added in version 1.2.0.
- Seealso:
- __init__(clock, P=0.0, I=0.0, D=0.0, I_limit=None, I_band=None, structure='parallel', **blockargs)[source]
- Parameters:
clock (Clock) – clock source
P (float) – proportional gain, defaults to 0
D (float) – derivative gain, defaults to 0
I (float) – integral gain, defaults to 0
D_pole (float) – filter pole for derivative estimate, defaults to 1 rad/s
I_limit (float or 2-tuple) – integral limit
I_band (float) – band within which integral action is active
structure (
str) – the structure of the PID implementation, “parallel” (default), “series”, “standard|ideal”blockargs (dict) –
common block options
- class bdsim.blocks.sampled.PoseIntegrator_S(clock, x0=None, **blockargs)[source]
Bases:
SampledBlockPOSEINTEGRATOR_S

Discrete-time spatial velocity integrator.
- Inputs:
1
- Outputs:
1
- States:
6
Port type
Port number
Types
Description
Input
0
ndarray(6,)
\(x\)
Output
0
SE3
\(y\)
This block integrates spatial velocity over time. The block input is a spatial velocity as a 6-vector \((v_x, v_y, v_z, \omega_x, \omega_y, \omega_z)\) and the output is pose as an
SE3instance.Note
State is a velocity twist.
- __init__(clock, x0=None, **blockargs)[source]
- Parameters:
clock (Clock) – clock source
x0 (SE3, optional) – Initial pose, defaults to null
blockargs (dict) –
common block options
- class bdsim.blocks.sampled.ZOH(clock, x0=0, **blockargs)[source]
Bases:
SampledBlockZOH

Zero-order hold.
- Inputs:
1
- Outputs:
1
- States:
N
Port type
Port number
Types
Description
Input
0
float, ndarray
\(x\)
Output
0
float, ndarray
\(y\)
Output is the input at the previous clock time $y_{k} = x_{k-1}. The state can be a scalar or a vector, this is given by the type of
x0.Note
If input is not a scalar,
x0must have the shape of the input signal.- __init__(clock, x0=0, **blockargs)[source]
- Parameters:
clock (Clock) – clock source
x0 (array_like, optional) – Initial value of the hold, defaults to 0
blockargs (dict) –
common block options
External Toolbox blocksets
External toolbox block documentation is maintained in each toolbox project.
Robotics Toolbox for Python: https://github.com/petercorke/robotics-toolbox-python
Machine Vision Toolbox for Python: https://github.com/petercorke/machinevision-toolbox-python