
Kernel.DoG#
- classmethod Kernel.DoG(sigma1: float, sigma2: float | None = None, h: int | None = None) Kernel[source][source]#
Difference of Gaussians kernel
- Parameters:
sigma1 (float) – standard deviation of first Gaussian kernel
sigma2 (float, optional) – standard deviation of second Gaussian kernel
h (int, optional) – half-width of Gaussian kernel
- Returns:
2h+1 x 2h+1 kernel
- Return type:
Return the 2-dimensional difference of Gaussian kernel defined by two standard deviation values:
\[\mathbf{K} = G(\sigma_1) - G(\sigma_2)\]where \(\sigma_1 > \sigma_2\). By default, \(\sigma_2 = 1.6 \sigma_1\).
The kernel is centred within a square array with side length given by:
\(2 \mbox{ceil}(3 \sigma) + 1\), or
\(2\mathtt{h} + 1\)
Example:
>>> from machinevisiontoolbox import Kernel >>> K = Kernel.DoG(1) >>> K Kernel: 7x7, min=-0.094, max=0.012, mean=-3.1e-19, SYMMETRIC (DoG σ1=1, σ2=1.6) >>> K.print() 0.00 0.00 0.01 0.01 0.01 0.00 0.00 0.00 0.01 0.01 0.01 0.01 0.01 0.00 0.01 0.01 -0.01 -0.04 -0.01 0.01 0.01 0.01 0.01 -0.04 -0.09 -0.04 0.01 0.01 0.01 0.01 -0.01 -0.04 -0.01 0.01 0.01 0.00 0.01 0.01 0.01 0.01 0.01 0.00 0.00 0.00 0.01 0.01 0.01 0.00 0.00
Example:
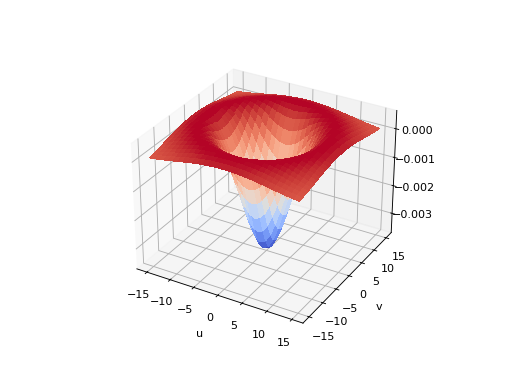
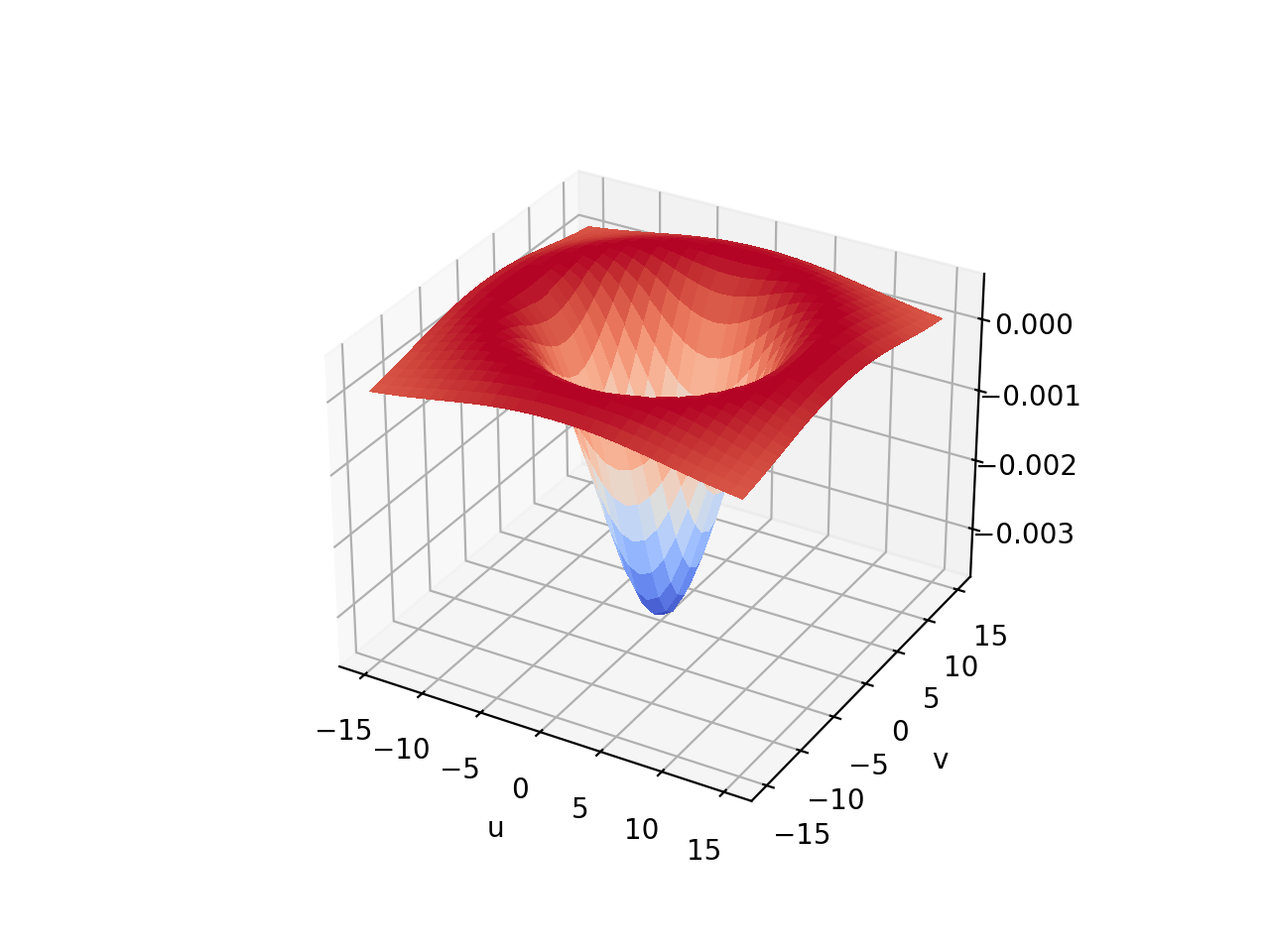
Kernel.DoG(5, 15).disp3d()
(
Source code,png,hires.png,pdf)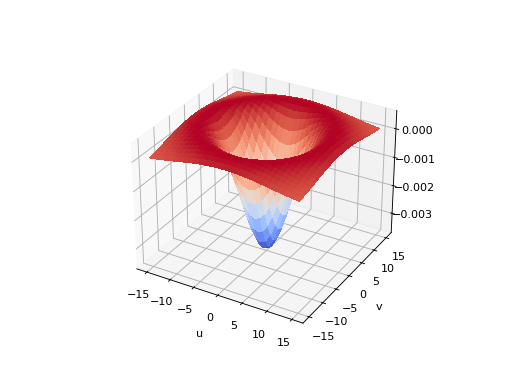
Note
This kernel is similar to the Laplacian of Gaussian and is often used as an efficient approximation.
This is a “Mexican hat” shaped kernel
- References:
P. Corke, Robotics, Vision & Control for Python, Springer, 2023, Section 11.5.1.3.
- Seealso:
{kind=link}
{kind=link}