Superclasses
Robot
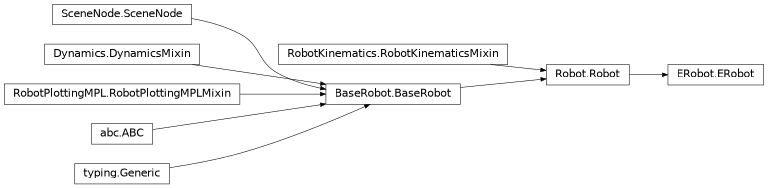
The various models ERobot models all subclass this class.
@author: Jesse Haviland @author: Peter Corke
- class roboticstoolbox.robot.Robot.Robot(arg, gripper_links=None, name='', manufacturer='', comment='', base=None, tool=None, gravity=[0, 0, -9.81], keywords=[], symbolic=False, configs=None, check_jindex=True)[source]
Bases:
BaseRobot[Link],RobotKinematicsMixin- classmethod URDF(file, gripper=None, manufacturer=None)[source]
Deprecated. Use
URDFRobotas a base class, or callURDF_read()fromroboticstoolbox.models.URDF.URDFRobotand constructRobotdirectly.
- property reach: float
Reach of the robot
- Returns:
Maximum reach of the robot
- Return type:
A conservative estimate of the reach of the robot. It is computed as the sum of the translational ETs that define the link transform.
Computed on the first access. If kinematic parameters subsequently change this will not be reflected.
Notes
Probably an overestimate of reach
Used by numerical inverse kinematics to scale translational error.
For a prismatic joint, uses
qlimif it is set
- fkine_all(q)[source]
Compute the pose of every link frame
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – The joint configuration- Return type:
- Returns:
Pose of all links
T = robot.fkine_all(q)is an SE3 instance withrobot.nlinks + 1values:T[0]is the base transformT[i]is the pose of link whosenumberisi
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
- manipulability(q=None, J=None, end=None, start=None, method='yoshikawa', axes='all', **kwargs)[source]
Manipulability measure
- Overloads:
self, q (ArrayLike), J (None), end (str | Link | Gripper | None), start (str | Link | Gripper | None), method (L[‘yoshikawa’, ‘asada’, ‘minsingular’, ‘invcondition’]), axes (L[‘all’, ‘trans’, ‘rot’] | list[bool]), kwargs → float | NDArray
self, q (None), J (NDArray), end (str | Link | Gripper | None), start (str | Link | Gripper | None), method (L[‘yoshikawa’, ‘asada’, ‘minsingular’, ‘invcondition’]), axes (L[‘all’, ‘trans’, ‘rot’] | list[bool]), kwargs → float | NDArray
- Parameters:
q – Joint coordinates, one of J or q required
J – Jacobian in base frame if already computed, one of J or q required
method (
Literal['yoshikawa','asada','minsingular','invcondition']) – method to use, “yoshikawa” (default), “invcondition”, “minsingular” or “asada”axes (
Union[Literal['all','trans','rot'],list[bool]]) – Task space axes to consider: “all” [default], “trans”, or “rot”
- Returns:
manipulability index
manipulability(q)is the scalar manipulability index for the robot at the joint configurationq. It indicates dexterity, that is, how well conditioned the robot is for motion with respect to the 6 degrees of Cartesian motion. The values is zero if the robot is at a singularity.Various measures are supported:
"yoshikawa"– volume of the velocity ellipsoid, distance from singularity [Yoshikawa85]"invcondition"– inverse condition number of Jacobian, isotropy of the velocity ellipsoid [Klein87]"minsingular"– minimum singular value of the Jacobian, distance from singularity [Klein87]"asada"– isotropy of the task-space acceleration ellipsoid which is a function of the Cartesian inertia matrix which depends on the inertial parameters [Asada83]
Trajectory operation:
If
qis a matrix (m,n) then the result (m,) is a vector of manipulability indices for each joint configuration specified by a row ofq.Notes
Invokes the
jacob0method of the robot ifJis not passed- The “all” option includes rotational and translational
dexterity, but this involves adding different units. It can be more useful to look at the translational and rotational manipulability separately.
- Examples in the RVC book (1st edition) can be replicated by
using the “all” option
- Asada’s measure requires inertial a robot model with inertial
parameters.
References
[Yoshikawa85]Manipulability of Robotic Mechanisms. Yoshikawa T., The International Journal of Robotics Research. 1985;4(2):3-9. doi:10.1177/027836498500400201
[Asada83]A geometrical representation of manipulator dynamics and its application to arm design, H. Asada, Journal of Dynamic Systems, Measurement, and Control, vol. 105, p. 131, 1983.
Robotics, Vision & Control, Chap 8, P. Corke, Springer 2011.
Changed in version 1.0.3: Removed ‘both’ option for axes, added a custom list option.
- jtraj(T1, T2, t, **kwargs)[source]
Joint-space trajectory between SE(3) poses
- Parameters:
- Returns:
trajectory
The initial and final poses are mapped to joint space using inverse kinematics:
if the object has an analytic solution
ikine_athat will be used,otherwise the general numerical algorithm
ikine_lmwill be used.
traj = obot.jtraj(T1, T2, t)is a trajectory object whose attributetraj.qis a row-wise joint-space trajectory.
- jacob0_dot(q, qd, J0=None, representation=None)[source]
Derivative of Jacobian
- Overloads:
self, q (ArrayLike), qd (ArrayLike), J0 (None), representation (L[‘rpy/xyz’, ‘rpy/zyx’, ‘eul’, ‘exp’] | None) → NDArray
self, q (None), qd (ArrayLike), J0 (NDArray), representation (L[‘rpy/xyz’, ‘rpy/zyx’, ‘eul’, ‘exp’] | None) → NDArray
- Parameters:
- Returns:
The derivative of the manipulator Jacobian
robot.jacob_dot(q, qd)computes the rate of change of the Jacobian elements\[\dmat{J} = \frac{d \mat{J}}{d \vec{q}} \frac{d \vec{q}}{dt}\]where the first term is the rank-3 Hessian.
If
J0is already calculated for the joint coordinatesqit can be passed in to to save computation time.It is computed as the mode-3 product of the Hessian tensor and the velocity vector.
The derivative of an analytical Jacobian can be obtained by setting
representationasrepresentationRotational representation
'rpy/xyz'RPY angular rates in XYZ order
'rpy/zyx'RPY angular rates in ZYX order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
References
- Kinematic Derivatives using the Elementary Transform
Sequence, J. Haviland and P. Corke
See also
- jacobm(q=None, J=None, H=None, end=None, start=None, axes='all')[source]
The manipulability Jacobian
- Overloads:
self, q (ArrayLike), J (None), H (None), end (str | Link | Gripper | None), start (str | Link | Gripper | None), axes (L[‘all’, ‘trans’, ‘rot’] | list[bool]) → NDArray
self, q (None), J (NDArray), H (NDArray), end (str | Link | Gripper | None), start (str | Link | Gripper | None), axes (L[‘all’, ‘trans’, ‘rot’] | list[bool]) → NDArray
- Parameters:
q – The joint angles/configuration of the robot (Optional, if not supplied will use the stored q values).
J – The manipulator Jacobian in any frame
H – The manipulator Hessian in any frame
end (
str|Link|Gripper|None) – the final link or Gripper which the Hessian representsstart (
str|Link|Gripper|None) – the first link which the Hessian represents
- Returns:
The manipulability Jacobian
This measure relates the rate of change of the manipulability to the joint velocities of the robot. One of J or q is required. Supply J and H if already calculated to save computation time.
Yoshikawa’s manipulability measure
\[m(\vec{q}) = \sqrt{\mat{J}(\vec{q}) \mat{J}(\vec{q})^T}\]This method returns its Jacobian with respect to configuration
\[\frac{\partial m(\vec{q})}{\partial \vec{q}}\]References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- closest_point(q, shape, inf_dist=1.0, skip=False)[source]
Find the closest point between robot and shape
- Parameters:
- Return type:
- Returns:
tuple of (distance, point on robot, point on shape)
closest_point(shape, inf_dist)returns the minimum euclidean distance between this robot and shape, provided it is less than inf_dist. It will also return the points on self and shape in the world frame which connect the line of length distance between the shapes. If the distance is negative then the shapes are collided.
- iscollided(q, shape, skip=False)[source]
Check if the robot is in collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms based on q, use this option if using this method in conjuction with Swift to save time
- Return type:
- Returns:
True if shapes have collided
iscollided(shape)checks if this robot and shape have collided
- collided(q, shape, skip=False)[source]
Check if the robot is in collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms based on q, use this option if using this method in conjuction with Swift to save time
- Return type:
- Returns:
True if shapes have collided
collided(shape)checks if this robot and shape have collided
- joint_velocity_damper(q=None, ps=0.05, pi=0.1, n=None, gain=1.0)[source]
Compute the joint velocity damper for QP motion control
- Parameters:
ps (
float) – The minimum angle (in radians) in which the joint is allowed to approach to its limitpi (
float) – The influence angle (in radians) in which the velocity damper becomes activen (
int|None) – The number of joints to consider. Defaults to all jointsgain (
float) – The gain for the velocity damper
- Return type:
- Returns:
tuple of (Ain, Bin) inequality constraint matrices for an optimiser
Formulates an inequality contraint which, when optimised for will make it impossible for the robot to run into joint limits. Requires the joint limits of the robot to be specified. See examples/mmc.py for use case.
- link_collision_damper(shape, q, di=0.3, ds=0.05, xi=1.0, end=None, start=None, collision_list=None)[source]
Compute a collision constrain for QP motion control
- Parameters:
ds (
float) – The minimum distance in which a joint is allowed to approach the collision object shapedi (
float) – The influence distance in which the velocity damper becomes activexi (
float) – The gain for the velocity damperstart (
Link|None) – The start link of the robot to considercollision_list (
list[Shape] |None) – A list of shapes to consider for collision
- Returns:
tuple of (Ain, Bin) inequality constraint matrices for an optimiser
Formulates an inequality contraint which, when optimised for will make it impossible for the robot to run into a collision. Requires See examples/neo.py for use case.
- vision_collision_damper(shape, camera=None, camera_n=0, q=None, di=0.3, ds=0.05, xi=1.0, end=None, start=None, collision_list=None)[source]
Compute a vision collision constrain for QP motion control
- Parameters:
camera (
Robot|SE3|None) – The camera link, either as a robotic link or SE3 posecamera_n (
int) – Degrees of freedom of the camera linkds – The minimum distance in which a joint is allowed to approach the collision object shape
di – The influence distance in which the velocity damper becomes active
xi – The gain for the velocity damper
end – The end link of the robot to consider
start – The start link of the robot to consider
collision_list – A list of shapes to consider for collision
- Returns:
tuple of (Ain, Bin) inequality constraint matrices for an optimiser
Formulates an inequality contraint which, when optimised for will make it impossible for the robot to run into a line of sight. See examples/fetch_vision.py for use case.
- rne(q, qd, qdd, symbolic=False, gravity=None)[source]
Compute inverse dynamics via recursive Newton-Euler formulation
- Parameters:
q (
ndarray) – Joint coordinatesqd (
ndarray) – Joint velocityqdd (
ndarray) – Joint accelerationsymbolic (
bool) – If True, supports symbolic expressionsgravity (
Union[ndarray,List[float],Tuple[float,...],None]) – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); defaults to attribute of self
- Returns:
Joint force/torques
rne_dh(q, qd, qdd)where the arguments have shape (n,) where n is the number of robot joints. The result has shape (n,).rne_dh(q, qd, qdd)where the arguments have shape (m,n) where n is the number of robot joints and where m is the number of steps in the joint trajectory. The result has shape (m,n).rne_dh(p)where the input is a 1D arrayp= [q, qd, qdd] with shape (3n,), and the result has shape (n,).rne_dh(p)where the input is a 2D arrayp= [q, qd, qdd] with shape (m,3n) and the result has shape (m,n).Notes
This version supports symbolic model parameters
Verified against MATLAB code
Warning
Assumes each link’s joint is the last element of its own ETS segment (Featherstone’s spatial-vector convention – fixed geometry gets you to the joint, the joint is the last thing applied before the next link’s frame). This is guaranteed for any
Robot/ERobotbuilt normally, either from a raw ETS (Robot.__init__splits it viaETS.split(), whose default “last” method enforces this per segment), from a URDF (each link’s ETS is built fixed-transform-then-joint, in that order), or from aPoERobot(_update_ets()appends the joint ET last too). It does not hold for aDHRobotusing standard DH conventions (mdh=False), where the joint comes first, followed byd/a/alpha– callingRobot.rne(dh_instance, ...)directly (bypassingDHRobot’s own correctrne()/rne_python()) gives silently wrong answers. ADHRobotbuilt withmdh=Trueis joint-last (DHLink._to_ets()’s MDH branch reorders a revolute link’sdtranslation to precede the joint rotation – valid since a z-rotation and a z-translation commute – so the joint ET is always last regardless ofd) and works correctly through this path. See rne.md / tech-debt.md.
- __getitem__(i)
Get link
This also supports iterating over each link in the robot object, from the base to the tool.
- Parameters:
- Return type:
- Returns:
i’th link or named link
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> print(robot[1]) # print the 2nd link RevoluteDH: θ=q, d=0, a=0.4318, ⍺=0.0 >>> print([link.a for link in robot]) # print all the a_j values [0, 0.4318, 0.0203, 0, 0, 0]
Notes
Robotsupports link lookup by name,eg.
robot['link1']
- __str__()
Pretty prints the ETS Model of the robot.
- Return type:
- Returns:
Pretty print of the robot model
Notes
Constant links are shown in blue.
End-effector links are prefixed with an @
Angles in degrees
- The robot base frame is denoted as
BASEand is equal to the robot’s
baseattribute.
- The robot base frame is denoted as
- accel(q, qd, torque, gravity=None)
Compute acceleration due to applied torque
- Parameters:
- Returns:
Joint accelerations
- Return type:
ndarray(n,)
qdd = accel(q, qd, torque)calculates a vector (n) of joint accelerations that result from applying the actuator force/torque (n) to the manipulator in stateq(n) andqd(n), andnis the number of robot joints.\[\ddot{q} = \mathbf{M}^{-1} \left(\tau - \mathbf{C}(q)\dot{q} - \mathbf{g}(q)\right)\]Trajectory operation
If
q,qd, torque are matrices (m,n) thenqddis a matrix (m,n) where each row is the acceleration corresponding to the equivalent rows of q, qd, torque.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.accel(puma.qz, 0.5 * np.ones(6), np.zeros(6)) array([ -7.5544, -12.22 , -6.4022, -5.4303, -4.9518, -2.1178])
Notes
- Useful for simulation of manipulator dynamics, in
conjunction with a numerical integration function.
- Uses the method 1 of Walker and Orin to compute the forward
dynamics.
- Featherstone’s method is more efficient for robots with large
numbers of joints.
Joint friction is considered.
References
- Efficient dynamic computer simulation of robotic mechanisms,
M. W. Walker and D. E. Orin, ASME Journal of Dynamic Systems, Measurement and Control, vol. 104, no. 3, pp. 205-211, 1982.
- accel_x(q, xd, wrench, gravity=None, pinv=False, representation='rpy/xyz')
Operational space acceleration due to applied wrench
- Parameters:
xd (ndarray(6,)) – Operational space velocity of the end-effector
wrench (ndarray(6,)) – Wrench applied to the end-effector
gravity – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the
gravityattribute of selfpinv – use pseudo inverse rather than inverse
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'
- Returns:
Operational space accelerations of the end-effector
- Return type:
ndarray(6,)
xdd = accel_x(q, qd, wrench)is the operational space acceleration due towrenchapplied to the end-effector of a robot in joint configurationqand joint velocityqd.\[\ddot{x} = \mathbf{J}(q) \mathbf{M}(q)^{-1} \left( \mathbf{J}(q)^T w - \mathbf{C}(q)\dot{q} - \mathbf{g}(q) \right)\]Trajectory operation
If
q,qd, torque are matrices (m,n) thenqddis a matrix (m,n) where each row is the acceleration corresponding to the equivalent rows of q, qd, wrench.Notes
- Useful for simulation of manipulator dynamics, in
conjunction with a numerical integration function.
- Uses the method 1 of Walker and Orin to compute the forward
dynamics.
- Featherstone’s method is more efficient for robots with large
numbers of joints.
Joint friction is considered.
See also
- addconfiguration(name, q)
Add a named joint configuration
Add a named configuration to the robot instance’s dictionary of named configurations.
- Parameters:
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.addconfiguration_attr("mypos", [0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.configs["mypos"] array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6])
See also
- addconfiguration_attr(name, q, unit='rad')
Add a named joint configuration as an attribute
- Parameters:
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.addconfiguration_attr("mypos", [0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.mypos array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.configs["mypos"] array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6])
Notes
Used in robot model init method to store the
qrconfiguration- Dynamically adding attributes to objects can cause issues with
Python type checking.
- Configuration is also added to the robot instance’s dictionary of
named configurations.
See also
- attach(object)
- attach_to(object)
- property base: SE3
Get/set robot base transform
robot.baseis the robot base transformrobot.base = ...checks and sets the robot base transform
- Parameters:
base – the new robot base transform
- Returns:
the current robot base transform
- property base_link: LinkType
Get the robot base link
robot.base_linkis the robot base link
- Returns:
the first link in the robot tree
- cinertia(q)
Deprecated, use
inertia_x
- property comment: str
Get/set robot comment
robot.commentis the robot commentrobot.comment = ...checks and sets the robot comment
- Parameters:
name – the new robot comment
- Returns:
robot comment
- configurations_str(border='thin')
- property control_mode: str
Get/set robot control mode
robot.control_typeis the robot control moderobot.control_type = ...checks and sets the robot control mode
- Parameters:
control_mode – the new robot control mode
- Returns:
the current robot control mode
- copy()
- coriolis(q, qd)
Coriolis and centripetal term
- Parameters:
- Returns:
Coriolis/centripetal velocity matrix
- Return type:
coriolis(q, qd)calculates the Coriolis/centripetal matrix (n,n) for the robot in configurationqand velocityqd, wherenis the number of joints.The product \(\mathbf{C} \dot{q}\) is the vector of joint force/torque due to velocity coupling. The diagonal elements are due to centripetal effects and the off-diagonal elements are due to Coriolis effects. This matrix is also known as the velocity coupling matrix, since it describes the disturbance forces on any joint due to velocity of all other joints.
Trajectory operation
If
qandqdare matrices (m,n), each row is interpretted as a joint configuration, and the result (n,n,m) is a 3d-matrix where each plane corresponds to a row ofqandqd.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.coriolis(puma.qz, 0.5 * np.ones((6,))) array([[-0.4017, -0.5513, -0.2025, -0.0007, -0.0013, 0. ], [ 0.2023, -0.1937, -0.3868, -0. , -0.002 , 0. ], [ 0.1987, 0.193 , -0. , 0. , -0.0001, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ], [ 0.0007, 0.0007, 0.0001, 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ]])
Notes
- Joint viscous friction is also a joint force proportional to
velocity but it is eliminated in the computation of this value.
Computationally slow, involves \(n^2/2\) invocations of RNE.
- coriolis_x(q, qd, pinv=False, representation='rpy/xyz', J=None, Ji=None, Jd=None, C=None, Mx=None)
Operational space Coriolis and centripetal term
- Parameters:
pinv – use pseudo inverse rather than inverse (Default value = False)
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'J (ndarray(6,n)) – pre-computed analytical Jacobian (optional)
Ji (ndarray(n,6)) – pre-computed inverse analytical Jacobian (optional)
Jd (ndarray(6,n)) – pre-computed time-derivative of analytical Jacobian (optional)
C (ndarray(n,n)) – pre-computed joint-space Coriolis matrix (optional)
Mx (ndarray(6,6)) – pre-computed operational-space inertia matrix (optional)
- Returns:
Operational space velocity matrix
- Return type:
ndarray(6,6)
coriolis_x(q, qd)is the Coriolis/centripetal matrix (m,m) in operational space for the robot in configurationqand velocityqd, wherenis the number of joints.\[\mathbf{C}_x = \mathbf{J}(q)^{-T} \left( \mathbf{C}(q) - \mathbf{M}_x(q) \mathbf{J})(q) \right) \mathbf{J}(q)^{-1}\]The product \(\mathbf{C} \dot{x}\) is the operational space wrench due to joint velocity coupling. This matrix is also known as the velocity coupling matrix, since it describes the disturbance forces on any joint due to velocity of all other joints.
The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If
qandqdare matrices (m,n), each row is interpretted as a joint configuration, and the result (n,n,m) is a 3d-matrix where each plane corresponds to a row ofqandqd.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.coriolis_x(puma.qn, 0.5 * np.ones((6,))) array([[-1.1492e+17, -3.4409e+17, -1.1492e+17, 1.7076e+15, 5.0074e+11, 1.7076e+15], [-9.0565e+13, -7.2695e+16, -9.0565e+13, 6.9150e+14, -2.2021e+15, 6.9150e+14], [ 1.6320e+17, 3.6514e+17, 1.6320e+17, -1.0105e+15, -5.5014e+11, -1.0105e+15], [ 3.6712e+15, 9.7095e+15, 3.6712e+15, 8.9640e-01, -9.2846e+14, 1.2846e+00], [ 5.7439e+14, 5.7182e+15, 5.7439e+14, -4.0981e+14, 5.0175e-02, -4.0981e+14], [ 3.6712e+15, 9.7095e+15, 3.6712e+15, 8.9640e-01, -9.2846e+14, 1.2846e+00]])
Notes
- Joint viscous friction is also a joint force proportional to
velocity but it is eliminated in the computation of this value.
Computationally slow, involves \(n^2/2\) invocations of RNE.
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
- property default_backend
Get default graphical backend
robot.default_backendGet the default graphical backend, used whenno explicit backend is passed to
Robot.plot.
robot.default_backend = ...Set the default graphical backend, used whenno explicit backend is passed to
Robot.plot. The default set here will be overridden if the particularRobotsubclass cannot support it.
- Returns:
backend name
- dfs_links(start, func=None)
A link search method
Visit all links from start in depth-first order and will apply func to each visited link
- Parameters:
start – The link to start at
func – An optional function to apply to each link as it is found
- Returns:
A list of links
- dotfile(filename, etsbox=False, ets='full', jtype=False, static=True)
Write a link transform graph as a GraphViz dot file
The file can be processed using dot:
% dot -Tpng -o out.png dotfile.dot
The nodes are:
Base is shown as a grey square. This is the world frame origin, but can be changed using the
baseattribute of the robot.Link frames are indicated by circles
ETS transforms are indicated by rounded boxes
The edges are:
an arrow if
jtypeis False or the joint is fixedan arrow with a round head if
jtypeis True and the joint is revolutean arrow with a box head if
jtypeis True and the joint is prismatic
Edge labels or nodes in blue have a fixed transformation to the preceding link.
Notes
If
filenameis a file object then the file will not be closed after the GraphViz model is written.- Parameters:
file – Name of file to write to
etsbox (
bool) – Put the link ETS in a box, otherwise an edge labelets (
Literal['full','brief']) – Display the full ets with “full” or a brief version with “brief”jtype (
bool) – Arrowhead to node indicates revolute or prismatic typestatic (
bool) – Show static joints in blue and bold
See also
- dynamics()
Pretty print the dynamic parameters (Robot superclass)
The dynamic parameters (inertial and friction) are printed in a table, with one row per link.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.dynamics() ┌───────┬───────┬─────────────────────────┬────────────────────────────────────────┬──────────┬───────────┬───────────────────┬───────┐ │ j │ m │ r │ I │ Jm │ B │ Tc │ G │ ├───────┼───────┼─────────────────────────┼────────────────────────────────────────┼──────────┼───────────┼───────────────────┼───────┤ │ link1 │ 0 │ 0, 0, 0 │ 0, 0.35, 0, 0, 0, 0 │ 0.0002 │ 0.00148 │ 0.395, -0.435 │ -62.6 │ │ link2 │ 17.4 │ -0.364, 0.006, 0.228 │ 0.13, 0.524, 0.539, 0, 0, 0 │ 0.0002 │ 0.000817 │ 0.126, -0.071 │ 108 │ │ link3 │ 4.8 │ -0.0203, -0.0141, 0.07 │ 0.066, 0.086, 0.0125, 0, 0, 0 │ 0.0002 │ 0.00138 │ 0.132, -0.105 │ -53.7 │ │ link4 │ 0.82 │ 0, 0.019, 0 │ 0.0018, 0.0013, 0.0018, 0, 0, 0 │ 3.3e-05 │ 7.12e-05 │ 0.0112, -0.0169 │ 76 │ │ link5 │ 0.34 │ 0, 0, 0 │ 0.0003, 0.0004, 0.0003, 0, 0, 0 │ 3.3e-05 │ 8.26e-05 │ 0.00926, -0.0145 │ 71.9 │ │ link6 │ 0.09 │ 0, 0, 0.032 │ 0.00015, 0.00015, 4e-05, 0, 0, 0 │ 3.3e-05 │ 3.67e-05 │ 0.00396, -0.0105 │ 76.7 │ └───────┴───────┴─────────────────────────┴────────────────────────────────────────┴──────────┴───────────┴───────────────────┴───────┘
- dynamics_list()
Print dynamic parameters (Robot superclass)
Display the kinematic and dynamic parameters to the console in reable format
- dynchanged(what=None)
Dynamic parameters have changed
Called from a property setter to inform the robot that the cache of dynamic parameters is invalid.
See also
roboticstoolbox.Link._dirties_frne()
- ets(start=None, end=None)
Robot to ETS
robot.ets()is an ETS representing the kinematics from base to end-effector.robot.ets(end=link)is an ETS representing the kinematics from base to the linklinkspecified as a Link reference or a name.robot.ets(start=l1, end=l2)is an ETS representing the kinematics from linkl1to linkl2.- Parameters:
start (:param) – start of path, defaults to
base_link:end (:param) – end of path, defaults to end-effector:
- Raises:
ValueError – a link does not belong to this ERobot
TypeError – a bad link argument
- Return type:
- Returns:
elementary transform sequence
Examples
>>> import roboticstoolbox as rtb >>> panda = rtb.models.ETS.Panda() >>> panda.ets() [ET.tz(param=0.333), ET.Rz(jindex=0), ET.Rx(param=-1.5707963267948966), ET.Rz(jindex=1), ET.Rx(param=1.5707963267948966), ET.tz(param=0.316), ET.Rz(jindex=2), ET.tx(param=0.0825), ET.Rx(param=1.5707963267948966), ET.Rz(jindex=3), ET.tx(param=-0.0825), ET.Rx(param=-1.5707963267948966), ET.tz(param=0.384), ET.Rz(jindex=4), ET.Rx(param=1.5707963267948966), ET.Rz(jindex=5), ET.tx(param=0.088), ET.Rx(param=1.5707963267948966), ET.tz(param=0.107), ET.Rz(jindex=6), ET.tz(param=0.10300000000000001), ET.Rz(param=-0.7853981633974483)]
- fdyn(T, q0, Q=None, Q_args={}, qd0=None, solver='RK45', solver_args={}, dt=None, progress=False)
Integrate forward dynamics
- Parameters:
T (
float) – integration timeq0 (
Union[ndarray,List[float],Tuple[float,...]]) – initial joint coordinatesQ (
Optional[Callable[[Any,float,ndarray,ndarray],ndarray]]) – a function that computes generalized joint force as a function of time and/or stateQ_args (
dict) – positional arguments passed totorqueqd0 (
Union[ndarray,List[float],Tuple[float,...],None]) – initial joint velocities, assumed zero if not givensolver (
str) – name of SciPy integrator to use, default'RK45'solver_args (
dict) – optional arguments passed to the SciPy integratordt (
float|None) – if given, interpolate the results to this timestepprogress (
bool) – show progress bar, default False
- Returns:
robot trajectory
- Return type:
namedtuple with fields
t,q,qd
tg = R.fdyn(T, q)integrates the dynamics of the robot with zero input torques over the time interval 0 toTand returns the trajectory as a namedtuple with elements:tthe time vector (M,)qthe joint coordinates (M,n)qdthe joint velocities (M,n)
tg = R.fdyn(T, q, torqfun)as above but the torque applied to the joints is given by the provided function:tau = function(robot, t, q, qd, **args)
where the inputs are:
the robot object
current time
current joint coordinates (n,)
current joint velocity (n,)
args, optional keyword arguments can be specified, these are passed in from the
targskeyword argument.
The function must return a Numpy array (n,) of joint forces/torques.
Examples
To apply zero joint torque to the robot without Coulomb friction:
>>> def myfunc(robot, t, q, qd): >>> return np.zeros((robot.n,))
>>> tg = robot.nofriction().fdyn(5, q0, myfunc)
>>> plt.figure() >>> plt.plot(tg.t, tg.q) >>> plt.show()
We could also use a lambda function:
>>> tg = robot.nofriction().fdyn( >>> 5, q0, lambda r, t, q, qd: np.zeros((r.n,)))
The robot is controlled by a PD controller. We first define a function to compute the control which has additional parameters for the setpoint and control gains (qstar, P, D):
>>> def myfunc(robot, t, q, qd, qstar, P, D): >>> return (qstar - q) * P + qd * D # P, D are (6,)
>>> tg = robot.fdyn(10, q0, myfunc, torque_args=(qstar, P, D)) )
Many integrators have variable step length which is problematic if we want to animate the result. If
dtis specified then the solver results are interpolated in time steps ofdt.Notes
- This function performs poorly with non-linear joint friction,
such as Coulomb friction. The R.nofriction() method can be used to set this friction to zero.
- If the function is not specified then zero force/torque is
applied to the manipulator joints.
Interpolation is performed using SciPy integrate.ode
The SciPy RK45 integrator is used by default
Interpolation is performed using SciPy interp1d
See also
DHRobot.accel(),DHRobot.nofriction(),DHRobot.rne()
- fellipse(q, opt='trans', unit='rad', centre='ee', add=True)
Create a force ellipsoid object for plotting with PyPlot.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – the joint configuration of the robotopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational force ellipsoidunit (
Literal['rad','deg']) –'rad'or'deg'centre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – centre of the ellipsoid —'ee'for the end-effector or a 3-vector[x, y, z]in the world frameadd (
bool) – ifTrue, add the ellipsoid to the active plot environment
- Returns:
an EllipsePlot object
- Return type:
EllipsePlot
robot.fellipse(q)creates a force ellipsoid for the robot at poseq. By default the ellipsoid is centered at the end-effector.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the end-effector. The option
centreallows its origin to be set to the specified 3-vector, or the string"ee"ensures it is drawn at the end-effector position.
- fkine(q, end=None, start=None, tool=None, include_base=True)
Forward kinematics
- Parameters:
- Return type:
- Returns:
The transformation matrix representing the pose of the end-effector
T = robot.fkine(q)evaluates forward kinematics for the robot at joint configurationq.Trajectory operation: If
qhas multiple rows (mxn), it is considered a trajectory and the result is anSE3instance withmvalues.Examples
The following example makes a
pandarobot object, and solves for the forward kinematics at the listed configuration.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) SE3(array([[ 0.995 , -0. , 0.0998, 0.484 ], [-0. , -1. , 0. , 0. ], [ 0.0998, -0. , -0.995 , 0.4126], [ 0. , 0. , 0. , 1. ]]))
Notes
- For a robot with a single end-effector there is no need to
specify
end
- For a robot with multiple end-effectors, the
endmust be specified.
- For a robot with multiple end-effectors, the
- The robot’s base tool transform, if set, is incorporated
into the result.
A tool transform, if provided, is incorporated into the result.
Works from the end-effector link to the base
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- friction(qd)
Manipulator joint friction (Robot superclass)
- Parameters:
qd (
ndarray) – The joint velocities of the robot- Returns:
The joint friction forces/torques for the robot
- Return type:
robot.friction(qd)is a vector of joint friction forces/torques for the robot moving with joint velocitiesqd.The friction model includes:
Viscous friction which is a linear function of velocity.
Coulomb friction which is proportional to sign(qd).
\[\begin{split}\tau_j = G^2 B \dot{q}_j + |G_j| \left\{ \begin{array}{ll} \tau_{C,j}^+ & \mbox{if $\dot{q}_j > 0$} \\ \tau_{C,j}^- & \mbox{if $\dot{q}_j < 0$} \end{array} \right.\end{split}\]Notes
- The friction value should be added to the motor output torque to
determine the nett torque. It has a negative value when qd > 0.
- The returned friction value is referred to the output of the
gearbox.
- The friction parameters in the Link object are referred to the
motor.
Motor viscous friction is scaled up by \(G^2\).
Motor Coulomb friction is scaled up by \(G\).
- The appropriate Coulomb friction value to use in the
non-symmetric case depends on the sign of the joint velocity, not the motor velocity.
- Coulomb friction is zero for zero joint velocity, stiction is
not modeled.
- The absolute value of the gear ratio is used. Negative gear
ratios are tricky: the Puma560 robot has negative gear ratio for joints 1 and 3.
See also
Robot.nofriction(),Link.friction()
- get_path(end=None, start=None)
Find a path from start to end
- Parameters:
- Raises:
ValueError – link not known or ambiguous
- Return type:
- Returns:
the path from start to end
- Returns:
the number of joints in the path
- Returns:
the tool transform present after end
- property gravity: ndarray
Get/set default gravitational acceleration (Robot superclass)
robot.gravityis the default gravitational accelerationrobot.gravity = ...checks and sets default gravitationalacceleration
- Parameters:
gravity – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive)
- Returns:
gravitational acceleration
- gravload(q=None, gravity=None)
Compute gravity load
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – Joint coordinatesgravity (
Union[ndarray,List[float],Tuple[float,...],None]) – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the stored gravity values
- Returns:
The generalised joint force/torques due to gravity
- Return type:
ndarray(n,)
robot.gravload(q)calculates the joint gravity loading (n) for the robot in the joint configurationqand using the default gravitational acceleration specified in the DHRobot object.robot.gravload(q, gravity=g)as above except the gravitational acceleration is explicitly specified asg.Trajectory operation
If q is a matrix (nxm) each column is interpreted as a joint configuration vector, and the result is a matrix (nxm) each column being the corresponding joint torques.
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.gravload(puma.qz) array([ 0. , 37.4837, 0.2489, 0. , 0. , 0. ])
- gravload_x(q=None, gravity=None, pinv=False, representation='rpy/xyz', Ji=None)
Operational space gravity load
- Parameters:
gravity (ndarray(3,)) – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the
gravityattribute of selfpinv – use pseudo inverse rather than inverse (Default value = False)
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'Ji (ndarray(n,6)) – pre-computed inverse analytical Jacobian (optional)
- Returns:
The operational space gravity wrench
- Return type:
ndarray(6,)
robot.gravload_x(q)calculates the gravity wrench for the robot in the joint configurationqand using the default gravitational acceleration specified in the robot object.robot.gravload_x(q, gravity=g)as above except the gravitational acceleration is explicitly specified asg.\[\mathbf{G}_x = \mathbf{J}(q)^{-T} \mathbf{G}(q)\]The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If q is a matrix (nxm) each column is interpreted as a joint configuration vector, and the result is a matrix (nxm) each column being the corresponding joint torques.
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.gravload_x(puma.qn) array([-30.1218, 7.5797, 53.7378, -0. , -0.0283, -0. ])
Notes
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
- property hascollision
Robot has collision model
- Returns:
Robot has collision model
- Returns:
At least one link has associated collision model.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hascollision False
See also
- property hasdynamics
Robot has dynamic parameters
- Returns:
Robot has dynamic parameters
- Returns:
At least one link has associated dynamic parameters.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hasdynamics True
- property hasgeometry
Robot has geometry model
At least one link has associated mesh to describe its shape.
- Returns:
Robot has geometry model
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hasgeometry True
See also
- hessian0(q=None, end=None, start=None, J0=None, tool=None)
Manipulator Hessian
- Overloads:
self (KinematicsProtocol), q (ArrayLike), end (str | Link | Gripper | None), start (str | Link | Gripper | None), J0 (None), tool (NDArray | SE3 | None) → NDArray
self (KinematicsProtocol), q (None), end (str | Link | Gripper | None), start (str | Link | Gripper | None), J0 (NDArray), tool (NDArray | SE3 | None) → NDArray
- Parameters:
q – The joint angles/configuration of the robot (Optional, if not supplied will use the stored q values).
end (
str|Link|Gripper|None) – the final link/Gripper which the Hessian representsstart (
str|Link|Gripper|None) – the first link which the Hessian representsJ0 – The manipulator Jacobian in the
startframetool (
ndarray|SE3|None) – a static tool transformation matrix to apply to the end of end, defaults to None
- Returns:
The manipulator Hessian in the
startframe
The manipulator Hessian tensor maps joint acceleration to end-effector spatial acceleration, expressed in the
startframe. This function calulcates this based on the ETS of the robot. One of J0 or q is required. Supply J0 if already calculated to save computation timeThis method computes the manipulator Hessian in the
startframe. If we take the time derivative of the differential kinematic relationship\[\begin{split}\nu &= \mat{J}(\vec{q}) \dvec{q} \\ \alpha &= \dmat{J} \dvec{q} + \mat{J} \ddvec{q}\end{split}\]where
\[\dmat{J} = \mat{H} \dvec{q}\]and \(\mat{H} \in \mathbb{R}^{6\times n \times n}\) is the Hessian tensor.
The elements of the Hessian are
\[\mat{H}_{i,j,k} = \frac{d^2 u_i}{d q_j d q_k}\]where \(u = \{t_x, t_y, t_z, r_x, r_y, r_z\}\) are the elements of the spatial velocity vector.
Similarly, we can write
\[\mat{J}_{i,j} = \frac{d u_i}{d q_j}\]Examples
The following example makes a
Pandarobot object, and solves for the base frame Hessian at the given joint angle configuration>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> panda.hessian0([0, -0.3, 0, -2.2, 0, 2, 0.7854]) array([[[-0.484 , -0. , -0.486 , -0. , -0.1547, 0. , -0. ], [ 0. , 0.0796, 0. , 0.2466, 0. , 0.2006, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , -1. , -0. , 1. , 0. , 1. , 0. ], [ 0. , -0. , -0.2955, -0. , 0.9463, -0. , 0.0998], [ 0. , 0. , -0. , -0. , 0. , -0. , 0. ]], [[-0. , -0.484 , -0. , 0.4986, -0. , 0.1086, 0. ], [ 0.0796, 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , -0.0796, -0. , -0.2466, -0. , -0.2006, -0. ], [ 0. , 0. , 0.9553, 0. , -0.3233, 0. , -0.995 ], [ 0. , 0. , -0. , -0. , 0. , -0. , 0. ], [ 0. , 0. , 0.2955, 0. , -0.9463, 0. , -0.0998]], [[-0.486 , -0. , -0.4643, -0. , -0.1478, 0. , 0. ], [ 0. , 0. , 0. , 0.383 , 0. , 0.2237, 0. ], [ 0. , -0. , -0.1436, -0. , -0.0457, -0. , -0. ], [ 0. , 0. , 0. , 0.9553, 0. , 0.9553, 0. ], [ 0. , 0. , 0. , -0. , 0.8085, -0. , -0.1987], [ 0. , 0. , 0. , 0.2955, 0. , 0.2955, 0. ]], [[-0. , 0.4986, -0. , -0.4986, 0. , -0.1086, -0. ], [ 0.2466, 0. , 0.383 , 0. , 0. , 0. , 0. ], [ 0. , -0.2466, -0. , 0.2466, 0. , 0.2006, 0. ], [ 0. , 0. , 0. , 0. , 0.3233, 0. , 0.995 ], [ 0. , 0. , 0. , 0. , 0. , 0. , -0. ], [ 0. , 0. , 0. , 0. , 0.9463, 0. , 0.0998]], [[-0.1547, -0. , -0.1478, 0. , 0.05 , -0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , -0.1676, -0. ], [ 0. , -0. , -0.0457, 0. , 0.1464, 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , -0.3233, 0. ], [ 0. , 0. , 0. , 0. , 0. , -0. , 0.9093], [ 0. , 0. , 0. , 0. , 0. , -0.9463, -0. ]], [[ 0. , 0.1086, 0. , -0.1086, -0. , -0.1086, -0. ], [ 0.2006, 0. , 0.2237, 0. , -0.1676, 0. , 0. ], [ 0. , -0.2006, -0. , 0.2006, 0. , 0.2006, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0.995 ], [ 0. , 0. , 0. , 0. , 0. , 0. , -0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0.0998]], [[-0. , 0. , 0. , -0. , 0. , -0. , 0. ], [ 0. , 0. , 0. , 0. , -0. , 0. , -0. ], [ 0. , -0. , -0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ]]])
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- hessiane(q=None, end=None, start=None, Je=None, tool=None)
Manipulator Hessian
- Overloads:
self (KinematicsProtocol), q (ArrayLike), end (str | Link | Gripper | None), start (str | Link | Gripper | None), Je (None), tool (NDArray | SE3 | None) → NDArray
self (KinematicsProtocol), q (None), end (str | Link | Gripper | None), start (str | Link | Gripper | None), Je (NDArray), tool (NDArray | SE3 | None) → NDArray
- Parameters:
q – The joint angles/configuration of the robot (Optional, if not supplied will use the stored q values).
end (
str|Link|Gripper|None) – the final link/Gripper which the Hessian representsstart (
str|Link|Gripper|None) – the first link which the Hessian representsJe – The manipulator Jacobian in the
endframetool (
ndarray|SE3|None) – a static tool transformation matrix to apply to the end of end, defaults to None
- Returns:
The manipulator Hessian in
endframe
The manipulator Hessian tensor maps joint acceleration to end-effector spatial acceleration, expressed in the
endcoordinate frame. This function calulcates this based on the ETS of the robot. One of J0 or q is required. Supply J0 if already calculated to save computation timeThis method computes the manipulator Hessian in the
endframe. If we take the time derivative of the differential kinematic relationship\[\begin{split}\nu &= \mat{J}(\vec{q}) \dvec{q} \\ \alpha &= \dmat{J} \dvec{q} + \mat{J} \ddvec{q}\end{split}\]where
\[\dmat{J} = \mat{H} \dvec{q}\]and \(\mat{H} \in \mathbb{R}^{6\times n \times n}\) is the Hessian tensor.
The elements of the Hessian are
\[\mat{H}_{i,j,k} = \frac{d^2 u_i}{d q_j d q_k}\]where \(u = \{t_x, t_y, t_z, r_x, r_y, r_z\}\) are the elements of the spatial velocity vector.
Similarly, we can write
\[\mat{J}_{i,j} = \frac{d u_i}{d q_j}\]Examples
The following example makes a
Pandarobot object, and solves for the end-effector frame Hessian at the given joint angle configuration>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> panda.hessiane([0, -0.3, 0, -2.2, 0, 2, 0.7854]) array([[[-0.4816, -0. , -0.4835, -0. , -0.1539, -0. , 0. ], [ 0. , -0.0796, 0. , -0.2466, 0. , -0.2006, 0. ], [-0.0483, -0. , -0.0485, -0. , -0.0154, -0. , 0. ], [ 0. , -0.995 , 0. , 0.995 , -0. , 0.995 , -0. ], [ 0. , 0. , 0.2955, -0. , -0.9463, -0. , -0.0998], [ 0. , -0.0998, 0. , 0.0998, -0. , 0.0998, 0. ]], [[-0. , -0.4896, -0. , 0.4715, -0. , 0.088 , 0. ], [-0.0796, 0. , 0. , -0. , 0. , -0. , 0. ], [-0. , 0.0309, 0. , 0.2952, 0. , 0.2104, -0. ], [ 0. , 0. , 0.9801, 0. , -0.4161, 0. , -1. ], [ 0. , 0. , -0. , -0. , 0. , -0. , 0. ], [ 0. , 0. , -0.1987, -0. , 0.9093, -0. , 0. ]], [[-0.4835, -0. , -0.4763, -0. , -0.1516, -0. , 0. ], [ 0. , 0. , 0. , -0.383 , 0. , -0.2237, 0. ], [-0.0485, 0. , 0.0965, -0. , 0.0307, -0. , 0. ], [ 0. , 0. , 0. , 0.9801, -0. , 0.9801, 0. ], [ 0. , 0. , 0. , -0. , -0.8085, -0. , 0.1987], [ 0. , 0. , 0. , -0.1987, -0. , -0.1987, -0. ]], [[-0. , 0.4715, -0. , -0.4715, 0. , -0.088 , 0. ], [-0.2466, -0. , -0.383 , 0. , -0. , 0. , -0. ], [-0. , 0.2952, -0. , -0.2952, -0. , -0.2104, 0. ], [ 0. , 0. , 0. , 0. , 0.4161, 0. , 1. ], [ 0. , 0. , 0. , 0. , -0. , 0. , -0. ], [ 0. , 0. , 0. , 0. , -0.9093, 0. , 0. ]], [[-0.1539, -0. , -0.1516, 0. , 0.0644, 0. , -0. ], [ 0. , 0. , 0. , -0. , -0. , 0.1676, -0. ], [-0.0154, 0. , 0.0307, -0. , -0.1407, -0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , -0.4161, -0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , -0.9093], [ 0. , 0. , 0. , 0. , 0. , 0.9093, 0. ]], [[-0. , 0.088 , -0. , -0.088 , 0. , -0.088 , 0. ], [-0.2006, -0. , -0.2237, 0. , 0.1676, 0. , -0. ], [-0. , 0.2104, -0. , -0.2104, -0. , -0.2104, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 1. ], [ 0. , 0. , 0. , 0. , 0. , 0. , -0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ]], [[ 0. , 0. , 0. , 0. , -0. , 0. , 0. ], [ 0. , 0. , 0. , -0. , -0. , -0. , -0. ], [ 0. , -0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. , 0. ]]])
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- hierarchy()
Pretty print the robot link hierachy
- Return type:
- Returns:
Pretty print of the robot model
Examples
Makes a robot and prints the heirachy
>>> import roboticstoolbox as rtb >>> robot = rtb.models.URDF.Panda() >>> robot.hierarchy() panda_link0 panda_link1 panda_link2 panda_link3 panda_link4 panda_link5 panda_link6 panda_link7 panda_link8 panda_hand panda_leftfinger panda_rightfinger
- ik_GN(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, pinv=True, pinv_damping=0.0)
Fast numerical inverse kinematics by Gauss-Newton optimization
- Parameters:
Tep (
ndarray|SE3) – The desired end-effector pose or pose trajectoryend (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
ndarray|None) – initial joint configuration (default to random valid joint configuration constrained by the joint limits of the robot)ilimit (
int) – maximum number of iterations per searchslimit (
int) – maximum number of search attemptstol (
float) – final error tolerancemask (
ndarray|None) – a mask vector which weights the end-effector error priority. Corresponds to translation in X, Y and Z and rotation about X, Y and Z respectivelyjoint_limits (
bool) – constrain the solution to being within the joint limits of the robot (reject solution with invalid joint configurations and perform another search up to the slimit)pinv (
int) – Use the pseudo-inverse instead of the normal matrix inversepinv_damping (
float) – Damping factor for the pseudo-inverse
- Return type:
- Returns:
tuple (q, success, iterations, searches, residual)
sol = ets.ik_GN(Tep)are the joint coordinates (n) corresponding to the robot end-effector poseTepwhich is anSE3orndarrayobject. This method can be used for robots with any number of degrees of freedom. This is a fast solver implemented in C++.See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
Note
When using this method with redundant robots (>6 DoF),
pinvmust be set toTrueThe return value
solis a tuple with elements:Element
Type
Description
qndarray(n)
joint coordinates in units of radians or metres
successint
whether a solution was found
iterationsint
total number of iterations
searchesint
total number of searches
residualfloat
final value of cost function
If
success == 0theqvalues will be valid numbers, but the solution will be in error. The amount of error is indicated by theresidual.Each iteration uses the Gauss-Newton optimisation method
\[\begin{split}\vec{q}_{k+1} &= \vec{q}_k + \left( {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \ {\mat{J}(\vec{q}_k)} \right)^{-1} \bf{g}_k \\ \bf{g}_k &= {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \vec{e}_k\end{split}\]where \(\mat{J} = {^0\mat{J}}\) is the base-frame manipulator Jacobian. If \(\mat{J}(\vec{q}_k)\) is non-singular, and \(\mat{W}_e = \mat{1}_n\), then the above provides the pseudoinverse solution. However, if \(\mat{J}(\vec{q}_k)\) is singular, the above can not be computed and the GN solution is infeasible.
Examples
The following example gets a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_GNmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ik_GN(Tep) (array([ 2.1973, 0.46 , -2.33 , -2.1857, 0.3706, 1.9377, 0.4941]), 1, 321, 22, 7.518120179749557e-08)
Notes
When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- ik_LM(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, k=1.0, method='chan')
Fast levenberg-Marquadt Numerical Inverse Kinematics Solver
- Parameters:
end (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameilimit (
int) – How many iterations are allowed within a search before a new search is startedslimit (
int) – How many searches are allowed before being deemed unsuccessfultol (
float) – Maximum allowed residual error Emask (
ndarray|None) – A 6 vector which assigns weights to Cartesian degrees-of-freedom error priorityjoint_limits (
bool) – Reject solutions with joint limit violationsk (
float) – Sets the gain value for the damping matrix Wn in the next iterationmethod (
Literal['chan','wampler','sugihara']) – One of “chan”, “sugihara” or “wampler”. Defines which method is used to calculate the damping matrix Wn in thestepmethod
- Return type:
- Returns:
tuple (q, success, iterations, searches, residual)
A method which provides functionality to perform numerical inverse kinematics (IK) using the Levemberg-Marquadt method. This is a fast solver implemented in C++.
See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
The operation is defined by the choice of the
methodkwarg.The step is deined as
\[\begin{split}\vec{q}_{k+1} &= \vec{q}_k + \left( \mat{A}_k \right)^{-1} \bf{g}_k \\ % \mat{A}_k &= {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \ {\mat{J}(\vec{q}_k)} + \mat{W}_n\end{split}\]where \(\mat{W}_n = \text{diag}(\vec{w_n})(\vec{w_n} \in \mathbb{R}^n_{>0})\) is a diagonal damping matrix. The damping matrix ensures that \(\mat{A}_k\) is non-singular and positive definite. The performance of the LM method largely depends on the choice of \(\mat{W}_n\).
Chan’s Method
Chan proposed
\[\mat{W}_n = λ E_k \mat{1}_n\]where λ is a constant which reportedly does not have much influence on performance. Use the kwarg
kto adjust the weighting term λ.Sugihara’s Method
Sugihara proposed
\[\mat{W}_n = E_k \mat{1}_n + \text{diag}(\hat{\vec{w}}_n)\]where \(\hat{\vec{w}}_n \in \mathbb{R}^n\), \(\hat{w}_{n_i} = l^2 \sim 0.01 l^2\), and \(l\) is the length of a typical link within the manipulator. We provide the variable
kas a kwarg to adjust the value of \(w_n\).Wampler’s Method
Wampler proposed \(\vec{w_n}\) to be a constant. This is set through the
kkwarg.Examples
The following example makes a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_LMmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ikine_LM(Tep) IKSolution(q=array([ 1.691 , -1.2511, -1.0325, -2.0984, -1.0799, 1.3747, 1.5825]), success=True, iterations=11, searches=1, residual=4.5730344008736186e-09, reason='Success')
Notes
The value for the
kkwarg will depend on themethodchosen and the arm you are using. Use the following as a rough guidechan, k = 1.0 - 0.01,wampler, k = 0.01 - 0.0001, andsugihara, k = 0.1 - 0.0001When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
This class supports null-space motion to assist with maximising manipulability and avoiding joint limits. These are enabled by setting kq and km to non-zero values.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
See also
Changed in version 1.0.4: Merged the Levemberg-Marquadt IK solvers into the ik_LM method
- ik_NR(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, pinv=True, pinv_damping=0.0)
Fast numerical inverse kinematics using Newton-Raphson optimization
- Parameters:
Tep (
ndarray|SE3) – The desired end-effector pose or pose trajectoryend (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
ndarray|None) – initial joint configuration (default to random valid joint configuration constrained by the joint limits of the robot)ilimit (
int) – maximum number of iterations per searchslimit (
int) – maximum number of search attemptstol (
float) – final error tolerancemask (
ndarray|None) – a mask vector which weights the end-effector error priority. Corresponds to translation in X, Y and Z and rotation about X, Y and Z respectivelyjoint_limits (
bool) – constrain the solution to being within the joint limits of the robot (reject solution with invalid joint configurations and perform another search up to the slimit)pinv (
int) – Use the pseudo-inverse instead of the normal matrix inversepinv_damping (
float) – Damping factor for the pseudo-inverse
- Return type:
- Returns:
tuple (q, success, iterations, searches, residual)
sol = ets.ik_NR(Tep)are the joint coordinates (n) corresponding to the robot end-effector poseTepwhich is anSE3orndarrayobject. This method can be used for robots with any number of degrees of freedom. This is a fast solver implemented in C++.See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
Note
When using this method with redundant robots (>6 DoF),
pinvmust be set toTrueThe return value
solis a tuple with elements:Element
Type
Description
qndarray(n)
joint coordinates in units of radians or metres
successint
whether a solution was found
iterationsint
total number of iterations
searchesint
total number of searches
residualfloat
final value of cost function
If
success == 0theqvalues will be valid numbers, but the solution will be in error. The amount of error is indicated by theresidual.Each iteration uses the Newton-Raphson optimisation method
\[\vec{q}_{k+1} = \vec{q}_k + {^0\mat{J}(\vec{q}_k)}^{-1} \vec{e}_k\]Examples
The following example gets a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_GNmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ik_NR(Tep) (array([ 1.3868, -0.8108, -1.0569, -2.1463, -0.7396, 1.7312, 1.3563]), 1, 428, 29, 1.6082806604646298e-10)
Notes
When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- ikine_GN(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, seed=None, pinv=False, kq=0.0, km=0.0, ps=0.0, pi=0.3, **kwargs)
Gauss-Newton Numerical Inverse Kinematics Solver
- Parameters:
end (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
Union[ndarray,List[float],Tuple[float,...],None]) – The initial joint coordinate vectorilimit (
int) – How many iterations are allowed within a search before a new search is startedslimit (
int) – How many searches are allowed before being deemed unsuccessfultol (
float) – Maximum allowed residual error Emask (
Union[ndarray,List[float],Tuple[float,...],None]) – A 6 vector which assigns weights to Cartesian degrees-of-freedom error priorityjoint_limits (
bool) – Reject solutions with joint limit violationsseed (
int|None) – A seed for the private RNG used to generate random joint coordinate vectorspinv (
bool) – If True, will use the pseudoinverse in thestepmethod instead of the normal inversekq (
float) – The gain for joint limit avoidance. Setting to 0.0 will remove this completely from the solutionkm (
float) – The gain for maximisation. Setting to 0.0 will remove this completely from the solutionps (
float) – The minimum angle/distance (in radians or metres) in which the joint is allowed to approach to its limitpi (
ndarray|float) – The influence angle/distance (in radians or metres) in null space motion becomes active
A method which provides functionality to perform numerical inverse kinematics (IK) using the Gauss-Newton method.
See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
Note
When using this method with redundant robots (>6 DoF),
pinvmust be set toTrueEach iteration uses the Gauss-Newton optimisation method
\[\begin{split}\vec{q}_{k+1} &= \vec{q}_k + \left( {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \ {\mat{J}(\vec{q}_k)} \right)^{-1} \bf{g}_k \\ \bf{g}_k &= {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \vec{e}_k\end{split}\]where \(\mat{J} = {^0\mat{J}}\) is the base-frame manipulator Jacobian. If \(\mat{J}(\vec{q}_k)\) is non-singular, and \(\mat{W}_e = \mat{1}_n\), then the above provides the pseudoinverse solution. However, if \(\mat{J}(\vec{q}_k)\) is singular, the above can not be computed and the GN solution is infeasible.
Examples
The following example gets a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_GNmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ikine_GN(Tep) IKSolution(q=array([-1.1987, 0.2476, 1.1615, -0.7472, 0.2528, 3.7287, 1.7676]), success=False, iterations=100, searches=100, residual=0.0, reason='iteration and search limit reached, 100 numpy.LinAlgError encountered')
Notes
When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
This class supports null-space motion to assist with maximising manipulability and avoiding joint limits. These are enabled by setting kq and km to non-zero values.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
See also
Changed in version 1.0.4: Added the Gauss-Newton IK solver method on the
Robotclass
- ikine_LM(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, seed=None, k=1.0, method='chan', kq=0.0, km=0.0, ps=0.0, pi=0.3, **kwargs)
Levenberg-Marquadt Numerical Inverse Kinematics Solver
- Parameters:
end (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
Union[ndarray,List[float],Tuple[float,...],None]) – The initial joint coordinate vectorilimit (
int) – How many iterations are allowed within a search before a new search is startedslimit (
int) – How many searches are allowed before being deemed unsuccessfultol (
float) – Maximum allowed residual error Emask (
Union[ndarray,List[float],Tuple[float,...],None]) – A 6 vector which assigns weights to Cartesian degrees-of-freedom error priorityjoint_limits (
bool) – Reject solutions with joint limit violationsseed (
int|None) – A seed for the private RNG used to generate random joint coordinate vectorsk (
float) – Sets the gain value for the damping matrix Wn in the next iterationmethod (
Literal['chan','wampler','sugihara']) – One of “chan”, “sugihara” or “wampler”. Defines which method is used to calculate the damping matrix Wn in thestepmethodkq (
float) – The gain for joint limit avoidance. Setting to 0.0 will remove this completely from the solutionkm (
float) – The gain for maximisation. Setting to 0.0 will remove this completely from the solutionps (
float) – The minimum angle/distance (in radians or metres) in which the joint is allowed to approach to its limitpi (
ndarray|float) – The influence angle/distance (in radians or metres) in null space motion becomes active
A method which provides functionality to perform numerical inverse kinematics (IK) using the Levemberg-Marquadt method.
See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
The operation is defined by the choice of the
methodkwarg.The step is deined as
\[\begin{split}\vec{q}_{k+1} &= \vec{q}_k + \left( \mat{A}_k \right)^{-1} \bf{g}_k \\ % \mat{A}_k &= {\mat{J}(\vec{q}_k)}^\top \mat{W}_e \ {\mat{J}(\vec{q}_k)} + \mat{W}_n\end{split}\]where \(\mat{W}_n = \text{diag}(\vec{w_n})(\vec{w_n} \in \mathbb{R}^n_{>0})\) is a diagonal damping matrix. The damping matrix ensures that \(\mat{A}_k\) is non-singular and positive definite. The performance of the LM method largely depends on the choice of \(\mat{W}_n\).
Chan’s Method
Chan proposed
\[\mat{W}_n = λ E_k \mat{1}_n\]where λ is a constant which reportedly does not have much influence on performance. Use the kwarg
kto adjust the weighting term λ.Sugihara’s Method
Sugihara proposed
\[\mat{W}_n = E_k \mat{1}_n + \text{diag}(\hat{\vec{w}}_n)\]where \(\hat{\vec{w}}_n \in \mathbb{R}^n\), \(\hat{w}_{n_i} = l^2 \sim 0.01 l^2\), and \(l\) is the length of a typical link within the manipulator. We provide the variable
kas a kwarg to adjust the value of \(w_n\).Wampler’s Method
Wampler proposed \(\vec{w_n}\) to be a constant. This is set through the
kkwarg.Examples
The following example makes a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_LMmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ikine_LM(Tep) IKSolution(q=array([ 1.5268, 1.1335, -2.0844, -2.1101, 0.9959, 1.4788, 0.0392]), success=True, iterations=20, searches=2, residual=8.242707674297318e-13, reason='Success')
Notes
The value for the
kkwarg will depend on themethodchosen and the arm you are using. Use the following as a rough guidechan, k = 1.0 - 0.01,wampler, k = 0.01 - 0.0001, andsugihara, k = 0.1 - 0.0001When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
This class supports null-space motion to assist with maximising manipulability and avoiding joint limits. These are enabled by setting kq and km to non-zero values.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
See also
Changed in version 1.0.4: Added the Levemberg-Marquadt IK solver method on the
Robotclass
- ikine_NR(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, seed=None, pinv=False, kq=0.0, km=0.0, ps=0.0, pi=0.3, **kwargs)
Newton-Raphson Numerical Inverse Kinematics Solver
- Parameters:
end (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
Union[ndarray,List[float],Tuple[float,...],None]) – The initial joint coordinate vectorilimit (
int) – How many iterations are allowed within a search before a new search is startedslimit (
int) – How many searches are allowed before being deemed unsuccessfultol (
float) – Maximum allowed residual error Emask (
Union[ndarray,List[float],Tuple[float,...],None]) – A 6 vector which assigns weights to Cartesian degrees-of-freedom error priorityjoint_limits (
bool) – Reject solutions with joint limit violationsseed (
int|None) – A seed for the private RNG used to generate random joint coordinate vectorspinv (
bool) – If True, will use the pseudoinverse in thestepmethod instead of the normal inversekq (
float) – The gain for joint limit avoidance. Setting to 0.0 will remove this completely from the solutionkm (
float) – The gain for maximisation. Setting to 0.0 will remove this completely from the solutionps (
float) – The minimum angle/distance (in radians or metres) in which the joint is allowed to approach to its limitpi (
ndarray|float) – The influence angle/distance (in radians or metres) in null space motion becomes active
A method which provides functionality to perform numerical inverse kinematics (IK) using the Newton-Raphson method.
See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
Note
When using this method with redundant robots (>6 DoF),
pinvmust be set toTrueEach iteration uses the Newton-Raphson optimisation method
\[\vec{q}_{k+1} = \vec{q}_k + {^0\mat{J}(\vec{q}_k)}^{-1} \vec{e}_k\]Examples
The following example gets a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_NRmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ikine_NR(Tep) IKSolution(q=array([-2.0567, 0.9791, 0.9205, -0.3356, -2.4424, 1.82 , -1.4081]), success=False, iterations=100, searches=100, residual=0.0, reason='iteration and search limit reached, 100 numpy.LinAlgError encountered')
Notes
When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
This class supports null-space motion to assist with maximising manipulability and avoiding joint limits. These are enabled by setting kq and km to non-zero values.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
See also
Changed in version 1.0.4: Added the Newton-Raphson IK solver method on the
Robotclass
- ikine_QP(Tep, end=None, start=None, q0=None, ilimit=30, slimit=100, tol=1e-06, mask=None, joint_limits=True, seed=None, kj=1.0, ks=1.0, kq=0.0, km=0.0, ps=0.0, pi=0.3, **kwargs)
Quadratic Programming Numerical Inverse Kinematics Solver
- Parameters:
end (
str|Link|Gripper|None) – the link considered as the end-effectorstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frameq0 (
Union[ndarray,List[float],Tuple[float,...],None]) – The initial joint coordinate vectorilimit (
int) – How many iterations are allowed within a search before a new search is startedslimit (
int) – How many searches are allowed before being deemed unsuccessfultol (
float) – Maximum allowed residual error Emask (
Union[ndarray,List[float],Tuple[float,...],None]) – A 6 vector which assigns weights to Cartesian degrees-of-freedom error priorityjoint_limits (
bool) – Reject solutions with joint limit violationsseed (
int|None) – A seed for the private RNG used to generate random joint coordinate vectorskj – A gain for joint velocity norm minimisation
ks – A gain which adjusts the cost of slack (intentional error)
kq (
float) – The gain for joint limit avoidance. Setting to 0.0 will remove this completely from the solutionkm (
float) – The gain for maximisation. Setting to 0.0 will remove this completely from the solutionps (
float) – The minimum angle/distance (in radians or metres) in which the joint is allowed to approach to its limitpi (
ndarray|float) – The influence angle/distance (in radians or metres) in null space motion becomes active
- Raises:
ImportError – If the package
qpsolversis not installed
A method that provides functionality to perform numerical inverse kinematics (IK) using a quadratic progamming approach.
See the Inverse Kinematics Docs Page for more details and for a tutorial on numerical IK, see here.
Each iteration uses the following approach
\[\vec{q}_{k+1} = \vec{q}_{k} + \dot{\vec{q}}.\]where the QP is defined as
\[\begin{split}\min_x \quad f_o(\vec{x}) &= \frac{1}{2} \vec{x}^\top \mathcal{Q} \vec{x}+ \mathcal{C}^\top \vec{x}, \\ \text{subject to} \quad \mathcal{J} \vec{x} &= \vec{\nu}, \\ \mathcal{A} \vec{x} &\leq \mathcal{B}, \\ \vec{x}^- &\leq \vec{x} \leq \vec{x}^+\end{split}\]with
\[\begin{split}\vec{x} &= \begin{pmatrix} \dvec{q} \\ \vec{\delta} \end{pmatrix} \in \mathbb{R}^{(n+6)} \\ \mathcal{Q} &= \begin{pmatrix} \lambda_q \mat{1}_{n} & \mathbf{0}_{6 \times 6} \\ \mathbf{0}_{n \times n} & \lambda_\delta \mat{1}_{6} \end{pmatrix} \in \mathbb{R}^{(n+6) \times (n+6)} \\ \mathcal{J} &= \begin{pmatrix} \mat{J}(\vec{q}) & \mat{1}_{6} \end{pmatrix} \in \mathbb{R}^{6 \times (n+6)} \\ \mathcal{C} &= \begin{pmatrix} \mat{J}_m \\ \bf{0}_{6 \times 1} \end{pmatrix} \in \mathbb{R}^{(n + 6)} \\ \mathcal{A} &= \begin{pmatrix} \mat{1}_{n \times n + 6} \\ \end{pmatrix} \in \mathbb{R}^{(l + n) \times (n + 6)} \\ \mathcal{B} &= \eta \begin{pmatrix} \frac{\rho_0 - \rho_s} {\rho_i - \rho_s} \\ \vdots \\ \frac{\rho_n - \rho_s} {\rho_i - \rho_s} \end{pmatrix} \in \mathbb{R}^{n} \\ \vec{x}^{-, +} &= \begin{pmatrix} \dvec{q}^{-, +} \\ \vec{\delta}^{-, +} \end{pmatrix} \in \mathbb{R}^{(n+6)},\end{split}\]where \(\vec{\delta} \in \mathbb{R}^6\) is the slack vector, \(\lambda_\delta \in \mathbb{R}^+\) is a gain term which adjusts the cost of the norm of the slack vector in the optimiser, \(\dvec{q}^{-,+}\) are the minimum and maximum joint velocities, and \(\dvec{\delta}^{-,+}\) are the minimum and maximum slack velocities.
Examples
The following example gets a
pandarobot object, makes a goal poseTep, and then solves for the joint coordinates which result in the poseTepusing theikine_QPmethod.>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> Tep = panda.fkine([0, -0.3, 0, -2.2, 0, 2, 0.7854]) >>> panda.ikine_QP(Tep) !! ImportError: the package qpsolvers is required for this class. Install using 'pip install qpsolvers' [ERR robot/Robot.py:2571:roboticstoolbox.robot.RobotKinematics.RobotKinematicsMixin.ikine_QP (source/arm_superclass.rst)]
Notes
When using the this method, the initial joint coordinates \(q_0\), should correspond to a non-singular manipulator pose, since it uses the manipulator Jacobian.
This class supports null-space motion to assist with maximising manipulability and avoiding joint limits. These are enabled by setting kq and km to non-zero values.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
See also
Changed in version 1.0.4: Added the Quadratic Programming IK solver method on the
Robotclass
- inertia(q)
Manipulator inertia matrix
inertia(q)is the symmetric joint inertia matrix (n,n) which relates joint torque to joint acceleration for the robot at joint configuration q.Trajectory operation
If
qis a matrix (m,n), each row is interpretted as a joint state vector, and the result is a 3d-matrix (nxnxk) where each plane corresponds to the inertia for the corresponding row of q.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.inertia(puma.qz) array([[ 3.9611, -0.1627, -0.1389, 0.0016, -0.0004, 0. ], [-0.1627, 4.4566, 0.3727, 0. , 0.0019, 0. ], [-0.1389, 0.3727, 0.9387, 0. , 0.0019, 0. ], [ 0.0016, 0. , 0. , 0.1924, 0. , 0. ], [-0.0004, 0.0019, 0.0019, 0. , 0.1713, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0.1941]])
Notes
- The diagonal elements
M[j,j]are the inertia seen by joint actuator
j.
- The diagonal elements
- The off-diagonal elements
M[j,k]are coupling inertias that relate acceleration on joint
jto force/torque on jointk.
- The off-diagonal elements
- The diagonal terms include the motor inertia reflected through
the gear ratio.
See also
- inertia_x(q=None, pinv=False, representation='rpy/xyz', Ji=None)
Operational space inertia matrix
- Parameters:
- Returns:
The operational space inertia matrix
- Return type:
ndarray(6,6)
robot.inertia_x(q)is the operational space (Cartesian) inertia matrix which relates Cartesian force/torque to Cartesian acceleration at the joint configuration q.\[\mathbf{M}_x = \mathbf{J}(q)^{-T} \mathbf{M}(q) \mathbf{J}(q)^{-1}\]The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If
qis a matrix (m,n), each row is interpretted as a joint state vector, and the result is a 3d-matrix (m,n,n) where each plane corresponds to the Cartesian inertia for the corresponding row ofq.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.inertia_x(puma.qn) array([[17.2954, -2.7542, -9.6233, 0. , 0.2795, 0. ], [-2.7542, 11.6452, 1.2459, 0.0001, -0.0703, 0.0001], [-9.6233, 1.2459, 13.3348, 0. , 0.2767, 0. ], [ 0. , 0.0001, 0. , 0.1941, 0. , 0.1941], [ 0.2795, -0.0703, 0.2767, 0. , 0.1713, 0. ], [ 0. , 0.0001, 0. , 0.1941, 0. , 0.1941]])
Notes
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
- isprismatic(j)
Check if joint is prismatic
- Return type:
- Returns:
True if prismatic
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.prismaticjoints [False, False, False, False, False, False] >>> stanford = rtb.models.DH.Stanford() >>> stanford.isprismatic(1) False
See also
Link.isprismatic(),prismaticjoints()
- isrevolute(j)
Check if joint is revolute
- Return type:
- Returns:
True if revolute
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.revolutejoints [True, True, True, True, True, True] >>> stanford = rtb.models.DH.Stanford() >>> stanford.isrevolute(1) True
See also
Link.isrevolute(),revolutejoints()
- itorque(q, qdd)
Inertia torque
- Parameters:
- Returns:
The inertia torque vector
- Return type:
ndarray(n,)
itorque(q, qdd)is the inertia force/torque vector (n) at the specified joint configuration q (n) and acceleration qdd (n), andnis the number of robot joints. It is \(\mathbf{I}(q) \ddot{q}\).Trajectory operation
If
qandqddare matrices (m,n), each row is interpretted as a joint configuration, and the result is a matrix (m,n) where each row is the corresponding joint torques.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.itorque(puma.qz, 0.5 * np.ones((6,))) array([1.8304, 2.3343, 0.5872, 0.0971, 0.0873, 0.0971])
Notes
- If the robot model contains non-zero motor inertia then this
will be included in the result.
See also
- jacob0(q, end=None, start=None, tool=None)
Manipulator geometric Jacobian in the
startframe- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – Joint coordinate vectorend (
str|Link|Gripper|None) – the particular link or gripper whose velocity the Jacobian describes, defaults to the end-effector if only one is presentstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frametool (
ndarray|SE3|None) – a static tool transformation matrix to apply to the end of end, defaults to None
- Return type:
- Returns:
Manipulator Jacobian in the
startframe
robot.jacobo(q)is the manipulator Jacobian matrix which maps joint velocity to end-effector spatial velocity expressed in the base frame.End-effector spatial velocity \(\nu = (v_x, v_y, v_z, \omega_x, \omega_y, \omega_z)^T\) is related to joint velocity by \({}^{E}\!\nu = \mathbf{J}_m(q) \dot{q}\).
Examples
The following example makes a
Puma560robot object, and solves for the base-frame Jacobian at the zero joint angle configuration>>> import roboticstoolbox as rtb >>> puma = rtb.models.Puma560() >>> puma.jacob0([0, 0, 0, 0, 0, 0]) array([[ 0.1295, -0.4854, -0.4854, -0. , -0.0533, 0. ], [ 0.4318, 0. , 0. , 0. , 0. , 0. ], [-0. , 0.4318, 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , -1. , -1. , 0. , -1. , 0. ], [ 1. , 0. , 0. , 1. , 0. , 1. ]])
Notes
- This is the geometric Jacobian as described in texts by
Corke, Spong etal., Siciliano etal. The end-effector velocity is described in terms of translational and angular velocity, not a velocity twist as per the text by Lynch & Park.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
- jacob0_analytical(q, representation='rpy/xyz', end=None, start=None, tool=None)
Manipulator analytical Jacobian in the
startframe- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – Joint coordinate vectorrepresentation (
Literal['rpy/xyz','rpy/zyx','eul','exp']) – angular representationend (
str|Link|Gripper|None) – the particular link or gripper whose velocity the Jacobian describes, defaults to the base linkstart (
str|Link|Gripper|None) – the link considered as the end-effector, defaults to the robots’s end-effectortool (
ndarray|SE3|None) – a static tool transformation matrix to apply to the end of end, defaults to None
- Returns:
Manipulator Jacobian in the
startframe
robot.jacob0_analytical(q)is the manipulator Jacobian matrix which maps joint velocity to end-effector spatial velocity expressed in thestartframe.End-effector spatial velocity \(\nu = (v_x, v_y, v_z, \omega_x, \omega_y, \omega_z)^T\) is related to joint velocity by \({}^{E}\!\nu = \mathbf{J}_m(q) \dot{q}\).
representationRotational representation
'rpy/xyz'RPY angular rates in XYZ order
'rpy/zyx'RPY angular rates in ZYX order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Examples
Makes a robot object and computes the analytic Jacobian for the given joint configuration
>>> import roboticstoolbox as rtb >>> puma = rtb.models.ETS.Puma560() >>> puma.jacob0_analytical([0, 0, 0, 0, 0, 0]) array([[ 0.15 , 0.8636, 0.4318, 0. , 0. , 0. ], [ 0.2203, 0. , 0. , 0.2 , 0. , 0.2 ], [ 0. , -0.2203, -0.2 , 0. , -0.2 , 0. ], [ 1. , 0. , 0. , 1. , 0. , 1. ], [ 0. , 1. , 1. , 0. , 1. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ]])
- jacobe(q, end=None, start=None, tool=None)
Manipulator geometric Jacobian in the end-effector frame
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – Joint coordinate vectorend (
str|Link|Gripper|None) – the particular link or gripper whose velocity the Jacobian describes, defaults to the end-effector if only one is presentstart (
str|Link|Gripper|None) – the link considered as the base frame, defaults to the robots’s base frametool (
ndarray|SE3|None) – a static tool transformation matrix to apply to the end of end, defaults to None
- Return type:
- Returns:
Manipulator Jacobian in the
endframe
robot.jacobe(q)is the manipulator Jacobian matrix which maps joint velocity to end-effector spatial velocity expressed in theendframe.End-effector spatial velocity \(\nu = (v_x, v_y, v_z, \omega_x, \omega_y, \omega_z)^T\) is related to joint velocity by \({}^{E}\!\nu = \mathbf{J}_m(q) \dot{q}\).
Examples
The following example makes a
Puma560robot object, and solves for the end-effector frame Jacobian at the zero joint angle configuration>>> import roboticstoolbox as rtb >>> puma = rtb.models.Puma560() >>> puma.jacobe([0, 0, 0, 0, 0, 0]) array([[ 0.1295, -0.4854, -0.4854, -0. , -0.0533, 0. ], [ 0.4318, 0. , 0. , 0. , 0. , 0. ], [-0. , 0.4318, 0. , 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ], [ 0. , -1. , -1. , 0. , -1. , 0. ], [ 1. , 0. , 0. , 1. , 0. , 1. ]])
Notes
- This is the geometric Jacobian as described in texts by
Corke, Spong etal., Siciliano etal. The end-effector velocity is described in terms of translational and angular velocity, not a velocity twist as per the text by Lynch & Park.
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
- jointdynamics(q, qd=None)
Transfer function of joint actuator
- Parameters:
- Returns:
transfer function denominators
- Return type:
list of 2-tuples
tf = jointdynamics(qd, q)calculates a vector of n continuous-time transfer functions that represent the transfer function 1/(Js+B) for each joint based on the dynamic parameters of the robot and the configuration q (n). n is the number of robot joints. The result is a list of tuples (J, B) for each joint.tf = jointdynamics(q, qd)as above but include the linearized effects of Coulomb friction when operating at joint velocity QD (1xN).
- linkcolormap(linkcolors='viridis')
Create a colormap for robot joints.
- Parameters:
linkcolors (
list[Any] |str) – list of colors or colormap name, defaults to"viridis"- Returns:
the color map
cm = robot.linkcolormap()is an n-element colormap that gives a unique color for every link. The RGBA colors for linkjarecm(j).cm = robot.linkcolormap(cmap)as above butcmapis the name of a valid matplotlib colormap. The default, example above, is theviridiscolormap.cm = robot.linkcolormap(list of colors)as above but a colormap is created from a list of n color names given as strings, tuples or hexstrings.
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> cm = robot.linkcolormap("inferno") >>> print(cm(range(6))) # cm(i) is 3rd color in colormap >>> cm = robot.linkcolormap( ... ['red', 'g', (0,0.5,0), '#0f8040', 'yellow', 'cyan']) >>> print(cm(range(6)))
Notes
Colormaps have 4-elements: red, green, blue, alpha (RGBA)
Names of supported colors and colormaps are defined in the matplotlib documentation.
- property links: list[LinkType]
Robot links
- Returns:
A list of link objects
Notes
It is probably more concise to index the robot object rather than the list of links, ie. the following are equivalent: -
robot.links[i]-robot[i]
- property manufacturer
Get/set robot manufacturer’s name
robot.manufactureris the robot manufacturer’s namerobot.manufacturer = ...checks and sets the manufacturer’s name
- Returns:
robot manufacturer’s name
- property n: int
Number of joints
- Returns:
Number of joints
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.n 6
See also
- property name: str
Get/set robot name
robot.nameis the robot namerobot.name = ...checks and sets the robot name
- Parameters:
name – the new robot name
- Returns:
the current robot name
- property nbranches: int
Number of branches
Number of branches in this robot. Computed as the number of links with zero children
- Returns:
number of branches in the robot’s kinematic tree
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.ETS.Panda() >>> robot.nbranches 1
- property nlinks
Number of links
The returned number is the total of both variable joints and static links
- Returns:
Number of links
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.nlinks 6
See also
- nofriction(coulomb=True, viscous=False)
Remove manipulator joint friction
- Parameters:
- Returns:
A copy of the robot with dynamic parameters perturbed
nofriction()copies the robot and returns a robot with the same link parameters except the Coulomb and/or viscous friction parameter are set to zero.See also
Robot.friction(),Link.nofriction()
- partial_fkine0(q, n=3, end=None, start=None)
Manipulator Forward Kinematics nth Partial Derivative
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – The joint angles/configuration of the robot (Optional, if not supplied will use the stored q values).n (
int) – The derivative order, must be >= 3end (
str|Link|Gripper|None) – the final link/Gripper which the Hessian representsstart (
str|Link|Gripper|None) – the first link which the Hessian represents
- Returns:
The nth Partial Derivative of the forward kinematics
This method computes the nth derivative of the forward kinematics where
nis greater than or equal to 3. This is an extension of the differential kinematics where the Jacobian is the first partial derivative and the Hessian is the second.Examples
The following example makes a
Pandarobot object, and solves for the base-effector frame 4th defivative of the forward kinematics at the given joint angle configuration>>> import roboticstoolbox as rtb >>> panda = rtb.models.Panda() >>> panda.partial_fkine0([0, -0.3, 0, -2.2, 0, 2, 0.7854], n=4) array([[[[[ 0.484 , 0. , 0.486 , ..., 0.1547, -0. , 0. ], [-0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 1. , 0. , ..., -0. , -1. , -0. ], [ 0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998], [ 0. , -0. , 0. , ..., -0. , 0. , -0. ]], [[ 0. , 0.484 , 0. , ..., 0. , -0.1086, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0. , -0. , ..., -0. , 0. , 0. ], [-1. , 0. , -0.9553, ..., 0.3233, -0. , 0.995 ], [-0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[ 0.4624, 0. , 0.4643, ..., 0.1478, -0. , 0. ], [-0. , 0.067 , -0. , ..., -0. , -0.2237, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.9553, 0. , ..., -0. , -0.9553, -0. ], [-0.2955, -0. , 0. , ..., -0.8085, 0. , 0.1987], [-0. , -0. , 0. , ..., -0. , 0. , 0. ]], ..., [[-0.1565, -0. , -0.1571, ..., -0.05 , 0. , 0. ], [ 0. , -0.4323, 0. , ..., -0. , 0.1676, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.3233, 0. , ..., 0. , 0.3233, -0. ], [ 0.9463, 0. , 0.8085, ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[ 0. , -0.484 , 0. , ..., -0. , 0.1086, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 1. , 0. , 0.9553, ..., -0.3233, 0. , -0.995 ], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ]], [[-0.4816, -0. , -0.4835, ..., -0.1539, 0. , 0. ], [ 0. , 0.0309, 0. , ..., 0. , 0.2104, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.995 , 0. , ..., 0. , 0.995 , 0. ], [ 0.0998, 0. , -0.1987, ..., 0.9093, -0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [-0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , -0. , 0.2955, ..., -0.9463, 0. , -0.0998]], [[-0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [-0.0796, -0. , 0. , ..., 0. , -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [-0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.143 , -0. , -0.1436, ..., -0.0457, -0. , 0. ], [-0. , 0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , -0.2955, 0. , ..., -0. , 0.2955, 0. ], [-0.2955, -0. , 0. , ..., -0. , 0. , 0. ]], ..., [[ 0. , 0. , -0. , ..., -0. , 0. , 0. ], [ 0.4581, 0. , 0.4599, ..., 0.1464, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.9463, 0. , ..., 0. , -0.9463, -0. ], [ 0.9463, 0. , 0. , ..., 0. , -0. , 0. ]], [[ 0. , -0. , 0. , ..., -0. , 0. , 0. ], [-0. , 0.0796, 0. , ..., 0. , 0.2006, 0. ], [ 0.0796, 0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0. , -0. , -0.2955, ..., 0.9463, 0. , 0.0998], [-0. , -0. , -0. , ..., 0. , 0. , 0. ]], [[-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0.0483, 0. , 0.0485, ..., 0.0154, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0.0998, -0. , ..., 0. , -0.0998, 0. ], [ 0.0998, 0. , 0. , ..., 0. , -0. , 0. ]]], [[[ 0.4624, 0. , 0.4643, ..., 0.1478, -0. , 0. ], [-0. , -0.0761, -0. , ..., -0. , -0.1916, 0. ], [-0.143 , -0. , -0.1436, ..., -0.0457, -0. , 0. ], [ 0. , 0.9553, 0. , ..., -0. , -0.9553, -0. ], [ 0. , 0. , 0.2823, ..., -0.904 , 0. , -0.0954], [ 0. , -0.2955, 0. , ..., 0. , 0.2955, 0. ]], [[ 0. , 0.4624, 0. , ..., 0. , -0.1037, 0. ], [-0. , -0. , -0.1436, ..., -0.0457, -0. , 0. ], [ 0. , 0.0091, 0. , ..., 0. , 0.1916, 0. ], [-0.9553, 0. , -0.9127, ..., 0.3089, -0. , 0.9506], [-0. , 0. , 0. , ..., -0. , 0.2955, 0. ], [ 0.2955, 0. , -0.2823, ..., 0.904 , -0. , 0.0954]], [[ 0.4418, 0. , 0.486 , ..., 0.1547, -0. , 0. ], [-0. , 0.064 , -0. , ..., -0. , -0.2137, 0. ], [-0.007 , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.9127, 0. , ..., -0. , -1. , -0. ], [-0.2823, -0. , 0. , ..., -0.7724, 0. , 0.1898], [-0. , 0.2823, 0. , ..., -0. , 0. , 0. ]], ..., [[-0.1495, -0. , -0.286 , ..., -0.091 , 0. , 0. ], [ 0. , -0.413 , 0. , ..., -0. , 0.1601, 0. ], [ 0.0223, -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.3089, 0. , ..., -0. , 0.5885, -0. ], [ 0.904 , 0. , 0.7724, ..., 0. , 0. , -0.8687], [-0. , -0.904 , 0. , ..., 0. , -0. , -0. ]], [[ 0. , -0.486 , 0. , ..., -0. , 0.0444, 0. ], [-0.143 , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.067 , 0. , ..., 0. , -0. , 0. ], [ 0.9553, 0. , 1. , ..., -0.5885, 0. , -0.9801], [-0. , -0.2955, -0. , ..., -0. , 0. , 0. ], [-0.2955, 0. , -0. , ..., 0. , 0. , 0. ]], [[-0.4601, -0. , -0.4763, ..., -0.1516, 0. , 0. ], [ 0. , 0.0295, 0. , ..., 0. , 0.201 , 0. ], [ 0.0023, 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.9506, 0. , ..., 0. , 0.9801, 0. ], [ 0.0954, -0. , -0.1898, ..., 0.8687, -0. , 0. ], [-0. , -0.0954, -0. , ..., 0. , -0. , 0. ]]], ..., [[[-0.1565, -0. , -0.1571, ..., -0.05 , 0. , 0. ], [ 0. , 0.0257, 0. , ..., 0. , 0.0648, 0. ], [ 0.4581, 0. , 0.4599, ..., 0.1464, 0. , 0. ], [ 0. , -0.3233, -0. , ..., 0. , 0.3233, 0. ], [ 0. , -0. , -0.0955, ..., 0.3059, -0. , 0.0323], [ 0. , 0.9463, -0. , ..., 0. , -0.9463, -0. ]], [[-0. , -0.1565, -0. , ..., -0. , 0.0351, 0. ], [ 0. , -0. , -0.0457, ..., 0.1464, 0. , 0. ], [-0. , 0.4066, -0. , ..., 0. , -0.0648, 0. ], [ 0.3233, 0. , 0.3089, ..., -0.1045, 0. , -0.3217], [ 0. , 0. , -0. , ..., 0. , -0.9463, -0. ], [-0.9463, 0. , -0.713 , ..., -0.3059, -0. , -0.0323]], [[-0.1495, -0. , -0.1366, ..., -0.091 , -0. , 0. ], [ 0. , -0.0217, 0. , ..., 0. , 0.0723, 0. ], [ 0.2994, 0. , 0.3028, ..., 0.1251, 0. , 0. ], [ 0. , -0.3089, 0. , ..., 0. , 0.5885, 0. ], [ 0.0955, 0. , 0. , ..., 0.2614, -0. , -0.0642], [ 0. , 0.713 , 0. , ..., 0. , -0.8085, -0. ]], ..., [[ 0.0506, 0. , 0.0075, ..., 0.1547, 0. , 0. ], [-0. , 0.1398, -0. , ..., -0. , -0.0542, 0. ], [ 0.2945, 0. , 0.2885, ..., -0. , -0. , 0. ], [-0. , 0.1045, -0. , ..., 0. , -1. , -0. ], [-0.3059, -0. , -0.2614, ..., 0. , 0. , 0.294 ], [-0. , 0.3059, -0. , ..., 0. , 0. , 0. ]], [[ 0. , 0.2318, 0. , ..., 0. , 0.1547, 0. ], [ 0.4581, 0. , 0.5056, ..., -0. , -0. , 0. ], [ 0. , -0.4323, 0. , ..., -0. , -0. , 0. ], [-0.3233, -0. , -0.5885, ..., 1. , 0. , 0.4161], [ 0. , 0.9463, 0. , ..., -0. , 0. , -0. ], [ 0.9463, 0. , 0.8085, ..., -0. , 0. , 0. ]], [[ 0.1557, 0. , 0.1518, ..., 0.0644, 0. , 0. ], [ 0. , -0.01 , 0. , ..., -0. , -0.068 , 0. ], [ 0.0311, -0. , 0.0304, ..., -0. , -0. , 0. ], [-0. , 0.3217, -0. , ..., 0. , -0.4161, 0. ], [-0.0323, 0. , 0.0642, ..., -0.294 , 0. , 0. ], [ 0. , 0.0323, 0. , ..., -0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0.0796, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , -0. , -0.2955, ..., 0.9463, 0. , 0.0998]], [[-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , -0.2006, -0. , ..., 0. , 0.2006, 0. ], [-0.2006, -0. , -0.2237, ..., 0.1676, 0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [-0. , 0. , -0. , ..., -0. , 0. , 0.0998], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ]], [[ 0. , 0.0593, 0. , ..., 0. , -0.0593, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0.0349, 0. , ..., 0. , 0.1916, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0.0295], [-0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0.2955, 0. , 0. , ..., 0.8085, -0. , 0.0954]], ..., [[-0. , -0.1898, -0. , ..., 0. , 0.1898, 0. ], [ 0. , -0. , 0. , ..., -0. , -0. , 0. ], [-0. , 0.3296, -0. , ..., -0. , -0.0648, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0.0945], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [-0.9463, -0. , -0.8085, ..., 0. , 0. , -0.0323]], [[ 0. , -0. , 0. , ..., -0. , -0. , 0. ], [-0. , 0.2006, 0. , ..., -0. , -0.2006, 0. ], [ 0.2006, 0. , 0.2237, ..., -0.1676, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0. , 0. , -0. , ..., -0. , 0. , -0.0998], [-0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[-0. , -0.028 , -0. , ..., -0. , 0. , 0. ], [-0.0483, 0. , -0.0485, ..., -0.0154, -0. , 0. ], [ 0. , 0.0375, 0. , ..., -0. , 0. , 0. ], [ 0. , -0. , 0.0295, ..., -0.0945, 0. , 0. ], [ 0. , -0.0998, -0. , ..., 0. , 0.0998, 0. ], [-0.0998, -0. , -0.0954, ..., 0.0323, 0. , 0. ]]], [[[-0.4816, -0. , -0.4835, ..., -0.1539, 0. , 0. ], [ 0. , 0.0792, 0. , ..., 0. , 0.1996, 0. ], [ 0.0483, 0. , 0.0485, ..., 0.0154, 0. , 0. ], [ 0. , -0.995 , -0. , ..., 0. , 0.995 , 0. ], [ 0. , -0. , -0.294 , ..., 0.9416, -0. , 0.0993], [ 0. , 0.0998, -0. , ..., 0. , -0.0998, 0. ]], [[-0. , -0.4816, -0. , ..., -0. , 0.108 , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0.1101, -0. , ..., -0. , -0.41 , 0. ], [ 0.995 , 0. , 0.9506, ..., -0.3217, 0. , -0.99 ], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ], [-0.0998, 0. , 0.4927, ..., -1.8509, 0. , -0.0993]], [[-0.4601, -0. , -0.4619, ..., -0.147 , 0. , 0. ], [ 0. , -0.0666, 0. , ..., 0. , 0.2226, 0. ], [-0.2385, -0. , -0.2394, ..., -0.0762, 0. , 0. ], [ 0. , -0.9506, 0. , ..., 0. , 0.9506, 0. ], [ 0.294 , 0. , 0. , ..., 0.8045, -0. , -0.1977], [ 0. , -0.4927, 0. , ..., 0. , 0.4927, 0. ]], ..., [[ 0.1557, 0. , 0.1563, ..., 0.0498, -0. , 0. ], [-0. , 0.4302, -0. , ..., 0. , -0.1667, 0. ], [ 0.8959, 0. , 0.8994, ..., 0.2863, 0. , 0. ], [-0. , 0.3217, -0. , ..., 0. , -0.3217, 0. ], [-0.9416, -0. , -0.8045, ..., 0. , -0. , 0.9048], [-0. , 1.8509, -0. , ..., 0. , -1.8509, -0. ]], [[-0. , 0.4816, -0. , ..., 0. , -0.108 , 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.1101, 0. , ..., 0. , 0.41 , 0. ], [-0.995 , -0. , -0.9506, ..., 0.3217, 0. , 0.99 ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0.0998, -0. , -0.4927, ..., 1.8509, 0. , 0.0993]], [[ 0.4792, 0. , 0.4811, ..., 0.1532, -0. , 0. ], [-0. , -0.0308, -0. , ..., -0. , -0.2093, 0. ], [ 0.0481, 0. , 0.0483, ..., 0.0154, 0. , 0. ], [-0. , 0.99 , -0. , ..., -0. , -0.99 , 0. ], [-0.0993, -0. , 0.1977, ..., -0.9048, 0. , 0. ], [-0. , 0.0993, -0. , ..., 0. , -0.0993, 0. ]]]], [[[[ 0. , 0.484 , 0. , ..., 0. , -0.1086, 0. ], [-0.0796, -0. , -0. , ..., -0. , -0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , -0.9553, ..., 0.3233, -0. , 0.995 ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [ 0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0.2191, -0. , -0.1436, ..., -0.0457, -0. , 0. ], [-0. , 0. , -0. , ..., -0. , 0. , 0. ], [ 0.9553, 0. , 0. , ..., -0. , -0. , 0. ], [-0. , -0.2955, 0. , ..., -0. , 0.2955, 0. ], [-0. , -0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , -0. , -0. , ..., -0. , 0. , 0. ], [ 0.4838, 0. , 0.4599, ..., 0.1464, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.3233, -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.9463, 0. , ..., 0. , -0.9463, -0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ]], [[-0. , -0. , 0. , ..., -0. , 0. , 0. ], [-0. , 0.0796, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0. , -0. , -0.2955, ..., 0.9463, 0. , 0.0998], [-0. , -0. , -0. , ..., 0. , 0. , 0. ]], [[-0. , 0. , -0. , ..., -0. , 0. , 0. ], [ 0.1276, 0. , 0.0485, ..., 0.0154, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.995 , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.0998, -0. , ..., 0. , -0.0998, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[ 0. , 0.484 , 0. , ..., 0. , -0.1086, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0.0796, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , -0.9553, ..., 0.3233, -0. , 0.995 ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , 0. , -0.2955, ..., 0.9463, -0. , 0.0998]], [[ 0.4154, 0. , 0.4643, ..., 0.1478, -0. , 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0.2952, 0. , 0.1436, ..., 0.0457, 0. , 0. ], [ 0. , 0.9553, 0. , ..., -0. , -0.9553, -0. ], [-0.2955, -0. , 0. , ..., 0. , 0. , 0. ], [-0. , 0.2955, 0. , ..., 0. , -0.2955, -0. ]], ..., [[-0.0058, -0. , -0.1571, ..., -0.05 , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.5095, -0. , -0.4599, ..., -0.1464, -0. , 0. ], [-0. , -0.3233, 0. , ..., 0. , 0.3233, -0. ], [ 0.9463, 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0.9463, -0. , ..., 0. , 0.9463, 0. ]], [[ 0. , -0.484 , 0. , ..., -0. , 0.1086, 0. ], [-0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [ 0. , 0. , 0.9553, ..., -0.3233, 0. , -0.995 ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [-0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998]], [[-0.4657, -0. , -0.4835, ..., -0.1539, 0. , 0. ], [ 0. , -0. , 0. , ..., 0. , -0. , 0. ], [-0.2068, -0. , -0.0485, ..., -0.0154, -0. , 0. ], [-0. , -0.995 , 0. , ..., 0. , 0.995 , 0. ], [ 0.0998, 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0.0998, 0. , ..., -0. , 0.0998, 0. ]]], [[[ 0. , 0.4624, 0. , ..., 0. , -0.1037, 0. ], [-0.2191, -0. , -0.1436, ..., -0.0457, -0. , 0. ], [ 0. , 0.0761, 0. , ..., 0. , 0.1916, 0. ], [ 0. , 0. , -0.9127, ..., 0.3089, -0. , 0.9506], [ 0. , -0.2955, 0. , ..., -0. , 0.2955, 0. ], [ 0. , -0. , -0.2823, ..., 0.904 , -0. , 0.0954]], [[-0.0235, 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0.067 , 0. , ..., 0. , 0.2237, 0. ], [ 0.0761, 0. , 0. , ..., 0. , 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0.2955, 0. , 0. , ..., 0.8085, -0. , -0.1987], [ 0. , 0. , -0. , ..., 0. , 0. , -0. ]], [[-0. , 0. , 0. , ..., 0. , -0.0661, 0. ], [-0.2232, 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.2137, 0. ], [ 0.9127, 0. , 0. , ..., -0.2389, -0. , 0.0587], [-0. , -0. , 0. , ..., -0. , 0. , 0. ], [ 0.2823, 0. , 0. , ..., 0.7724, -0. , -0.1898]], ..., [[ 0. , -0.0644, -0. , ..., -0. , 0.0495, 0. ], [ 0.1154, -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.3914, -0. , ..., 0. , -0.1601, 0. ], [-0.3089, -0. , 0.2389, ..., 0. , 0. , -0.2687], [ 0. , -0.8085, 0. , ..., 0. , 0. , -0. ], [-0.904 , -0. , -0.7724, ..., -0. , -0. , 0.8687]], [[ 0. , -0. , 0. , ..., -0. , -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , -0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0.2955, 0. , -0. , ..., -0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[-0. , 0.0158, -0. , ..., -0. , 0.0622, 0. ], [ 0.2227, -0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0.0962, -0. , ..., -0. , -0.201 , 0. ], [-0.9506, -0. , -0.0587, ..., 0.2687, 0. , 0. ], [-0. , 0.1987, -0. , ..., 0. , 0. , 0. ], [-0.0954, 0. , 0.1898, ..., -0.8687, 0. , 0. ]]], ..., [[[ 0. , -0.1565, -0. , ..., -0. , 0.0351, 0. ], [ 0.4838, 0. , 0.4599, ..., 0.1464, 0. , 0. ], [ 0. , -0.0257, 0. , ..., 0. , -0.0648, 0. ], [ 0. , -0. , 0.3089, ..., -0.1045, 0. , -0.3217], [ 0. , 0.9463, -0. , ..., 0. , -0.9463, -0. ], [ 0. , 0. , 0.0955, ..., -0.3059, -0. , -0.0323]], [[ 0.0754, -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.4323, 0. , ..., 0. , -0.1676, 0. ], [-0.0257, 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0.9463, 0. , -0.8085, ..., -0. , -0. , 0.9093], [-0. , 0. , -0. , ..., -0. , 0. , 0. ]], [[-0. , -0. , -0. , ..., -0. , 0.0495, 0. ], [ 0.3925, 0. , 0.3929, ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.1601, 0. ], [-0.3089, -0. , 0. , ..., 0. , 0. , -0.2687], [ 0. , 0.8085, 0. , ..., 0. , 0. , -0. ], [-0.0955, 0. , 0. , ..., -0. , -0. , 0.8687]], ..., [[ 0. , 0. , 0. , ..., 0. , -0.1586, 0. ], [ 0.0668, 0. , 0.1251, ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.0542, 0. ], [ 0.1045, 0. , -0. , ..., 0. , -0. , 0.8605], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0.3059, 0. , 0. , ..., 0. , -0. , -0.294 ]], [[-0. , 0. , -0. , ..., -0. , 0. , 0. ], [ 0. , -0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0.9463, 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , -0.0724, 0. , ..., 0. , -0.1991, 0. ], [-0.4578, -0. , -0.4726, ..., 0. , -0. , 0. ], [-0. , 0.4401, -0. , ..., 0. , 0.068 , 0. ], [ 0.3217, 0. , 0.2687, ..., -0.8605, -0. , 0. ], [ 0. , -0.9093, 0. , ..., -0. , -0. , 0. ], [ 0.0323, -0. , -0.8687, ..., 0.294 , -0. , -0. ]]], [[[-0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , 0.0796, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , -0. , -0.2955, ..., 0.9463, 0. , 0.0998], [ 0. , -0. , -0. , ..., 0. , -0. , 0. ]], [[-0. , -0.484 , -0. , ..., -0. , 0.1086, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.0796, -0. , ..., -0. , -0.2006, 0. ], [-0. , 0. , 0.9553, ..., -0.3233, 0. , -0.995 ], [ 0. , 0. , -0. , ..., 0. , -0. , -0. ], [ 0. , 0. , 0.2955, ..., -0.9463, 0. , -0.0998]], [[-0.5217, -0. , -0.5304, ..., -0.0983, -0. , 0. ], [ 0. , 0.0897, 0. , ..., -0. , 0.2237, 0. ], [ 0.0486, 0. , 0.0701, ..., -0.2058, 0. , 0. ], [ 0. , -0.9553, 0. , ..., 0. , 0.9553, 0. ], [ 0.2955, 0. , 0. , ..., 1.617 , -0. , -0.1987], [ 0. , -0.2955, 0. , ..., 0. , 0.2955, 0. ]], ..., [[ 0.3463, 0. , 0.3688, ..., -0.1086, 0. , 0. ], [-0. , 0.697 , -0. , ..., 0. , -0.1676, 0. ], [ 0.3932, 0. , 0.3875, ..., 0.2006, 0. , 0. ], [-0. , 0.3233, -0. , ..., 0. , -0.3233, 0. ], [-0.9463, -0. , -1.617 , ..., 0. , -0. , 0.9093], [-0. , 0.9463, -0. , ..., 0. , -0.9463, -0. ]], [[-0. , 0.484 , -0. , ..., 0. , -0.1086, 0. ], [-0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0.0796, 0. , ..., -0. , 0.2006, 0. ], [ 0. , -0. , -0.9553, ..., 0.3233, 0. , 0.995 ], [-0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , -0. , -0.2955, ..., 0.9463, 0. , 0.0998]], [[ 0.4937, 0. , 0.5059, ..., 0.1372, -0. , 0. ], [-0. , -0.2413, -0. , ..., 0. , 0. , 0. ], [-0.072 , -0. , -0.1741, ..., 0.1822, 0. , 0. ], [-0. , 0.995 , -0. , ..., -0. , -0.995 , 0. ], [-0.0998, 0. , 0.1987, ..., -0.9093, 0. , 0. ], [-0. , 0.0998, -0. , ..., 0. , -0.0998, 0. ]]], [[[-0. , -0.4816, -0. , ..., -0. , 0.108 , 0. ], [ 0.1276, 0. , 0.0485, ..., 0.0154, 0. , 0. ], [-0. , -0.0792, -0. , ..., -0. , -0.1996, 0. ], [ 0. , -0. , 0.9506, ..., -0.3217, 0. , -0.99 ], [ 0. , 0.0998, -0. , ..., 0. , -0.0998, 0. ], [ 0. , 0. , 0.294 , ..., -0.9416, 0. , -0.0993]], [[ 0.0079, -0. , 0. , ..., -0. , 0. , 0. ], [-0. , -0.0309, -0. , ..., -0. , -0.2104, 0. ], [-0.0792, -0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0.0998, 0. , 0.1987, ..., -0.9093, 0. , 0. ], [-0. , 0. , 0. , ..., -0. , 0. , -0. ]], [[-0. , -0. , -0. , ..., -0. , -0. , 0. ], [-0.0181, -0. , -0.0965, ..., -0.0307, 0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [-0.9506, -0. , 0. , ..., -0. , 0. , 0. ], [ 0. , -0.1987, 0. , ..., 0. , 0.1987, -0. ], [-0.294 , -0. , 0. , ..., -0. , 0. , 0. ]], ..., [[ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0.407 , 0. , 0.4419, ..., 0.1407, -0. , 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0.3217, 0. , 0. , ..., 0. , -0. , -0. ], [-0. , 0.9093, -0. , ..., 0. , -0.9093, 0. ], [ 0.9416, 0. , 0. , ..., 0. , -0. , -0. ]], [[-0.0079, 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0.0309, 0. , ..., 0. , 0.2104, 0. ], [ 0.0792, 0. , 0. , ..., 0. , 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0.0998, -0. , -0.1987, ..., 0.9093, 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.0796, -0. , 0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0.99 , 0. , -0. , ..., 0. , -0. , 0. ], [-0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0.0993, 0. , -0. , ..., 0. , -0. , 0. ]]]], [[[[ 0.486 , 0. , 0.4643, ..., 0.1478, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.2237, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.9553, -0. ], [ 0. , 0. , 0. , ..., -0.8085, 0. , 0.1987], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0. , -0.1436, ..., -0.0457, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , -0. ], [ 0. , 0. , 0. , ..., -0. , 0.2955, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0.4643, 0. , 0.486 , ..., 0.1547, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.2137, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -1. , -0. ], [ 0. , 0. , 0. , ..., -0.7724, 0. , 0.1898], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]], ..., [[-0.1571, -0. , -0.286 , ..., -0.091 , 0. , 0. ], [-0. , -0.3914, 0. , ..., -0. , 0.1601, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.5885, -0. ], [ 0.8085, 0. , 0.7724, ..., 0. , 0. , -0.8687], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[ 0. , -0.486 , 0. , ..., -0. , 0.0444, 0. ], [-0.143 , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0.9553, 0. , 1. , ..., -0.5885, -0. , -0.9801], [-0. , -0.2955, -0. , ..., -0. , 0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ]], [[-0.4835, -0. , -0.4763, ..., -0.1516, 0. , 0. ], [ 0. , 0.0962, 0. , ..., 0. , 0.201 , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.9801, 0. ], [-0.1987, -0. , -0.1898, ..., 0.8687, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [-0. , -0. , -0.1436, ..., -0.0457, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , -0. ], [ 0. , 0. , 0. , ..., -0. , 0.2955, 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]], [[ 0.486 , 0. , 0.4643, ..., 0.1478, -0. , 0. ], [ 0. , -0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0. , 0.1436, ..., 0.0457, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.9553, -0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.2955, -0. ]], [[ 0. , 0. , 0. , ..., 0. , -0.0661, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.2137, 0. ], [ 0. , 0. , 0. , ..., -0.2389, -0. , 0.0587], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0.7724, -0. , -0.1898]], ..., [[ 0. , -0.0644, -0. , ..., -0. , 0.0495, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.3914, -0. , ..., 0. , -0.1601, 0. ], [ 0. , 0. , 0.2389, ..., 0. , 0. , -0.2687], [ 0. , 0. , 0. , ..., -0. , 0. , -0. ], [ 0. , -0. , -0.7724, ..., 0. , -0. , 0.8687]], [[-0.0471, -0. , 0. , ..., -0. , -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0.2191, -0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0.9553, 0. , ..., -0. , 0. , -0. ], [-0.2955, -0. , -0. , ..., -0. , 0. , -0. ], [-0. , 0.2955, 0. , ..., 0. , 0. , -0. ]], [[-0. , 0.0158, -0. , ..., -0. , 0.0622, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0.0962, -0. , ..., -0. , -0.201 , 0. ], [ 0. , 0. , -0.0587, ..., 0.2687, 0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0. , -0. ], [-0. , 0. , 0.1898, ..., -0.8687, 0. , 0. ]]], [[[ 0.4643, 0. , 0.486 , ..., 0.1547, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.2137, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -1. , -0. ], [ 0. , 0. , 0. , ..., -0.7724, 0. , 0.1898], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , -0.0661, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.2137, 0. ], [ 0. , 0. , 0. , ..., -0.2389, -0. , 0.0587], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0.7724, -0. , -0.1898]], [[ 0.4435, 0. , 0.4643, ..., 0.1478, -0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.2237, 0. ], [ 0.1372, 0. , 0.1436, ..., 0.0457, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.9553, -0. ], [ 0. , 0. , 0. , ..., -0.8085, 0. , 0.1987], [ 0. , 0. , 0. , ..., -0. , -0.2955, -0. ]], ..., [[-0.0344, -0. , -0.2732, ..., -0.087 , 0. , 0. ], [-0. , -0.3929, 0. , ..., -0. , 0.1676, 0. ], [-0.0274, -0. , -0.0845, ..., -0.0269, 0. , 0. ], [ 0. , 0.2389, 0. , ..., 0. , 0.5622, -0. ], [ 0.7724, 0. , 0.8085, ..., 0. , 0. , -0.9093], [ 0. , -0.7724, 0. , ..., 0. , 0.1739, -0. ]], [[ 0. , -0.484 , 0. , ..., -0. , 0.0425, 0. ], [-0.2872, 0. , -0. , ..., -0. , -0. , 0. ], [-0. , -0.0796, 0. , ..., -0. , 0.0131, 0. ], [ 1. , 0. , 0.9553, ..., -0.5622, 0. , -0.9363], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [-0. , 0. , 0.2955, ..., -0.1739, 0. , -0.2896]], [[-0.4904, -0. , -0.455 , ..., -0.1448, 0. , 0. ], [ 0. , 0.0965, 0. , ..., 0. , 0.2104, 0. ], [-0.1476, -0. , -0.1407, ..., -0.0448, 0. , 0. ], [ 0. , -0.0587, 0. , ..., 0. , 0.9363, 0. ], [-0.1898, -0. , -0.1987, ..., 0.9093, -0. , 0. ], [-0. , 0.1898, 0. , ..., 0. , 0.2896, 0. ]]], ..., [[[-0.1571, -0. , -0.286 , ..., -0.091 , -0. , 0. ], [-0. , 0. , 0. , ..., 0. , 0.0723, 0. ], [ 0.3914, 0. , 0.3929, ..., 0.1251, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.5885, 0. ], [ 0. , -0. , 0. , ..., 0.2614, -0. , -0.0642], [ 0. , 0.8085, -0. , ..., 0. , -0.8085, -0. ]], [[-0. , -0.0644, -0. , ..., -0. , 0.0495, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.3914, -0. , ..., 0. , -0.1601, 0. ], [-0. , 0. , 0.2389, ..., 0. , 0. , -0.2687], [ 0. , 0. , -0. , ..., 0. , -0. , -0. ], [-0.8085, 0. , -0.7724, ..., 0. , -0. , 0.8687]], [[-0.2657, -0. , -0.3893, ..., -0.1239, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.1316, 0. ], [ 0.3274, 0. , 0.2908, ..., 0.0926, 0. , 0. ], [-0. , -0.2389, 0. , ..., 0. , 0.8011, 0. ], [ 0. , 0. , 0. , ..., 0.4758, -0. , -0.1169], [ 0. , 0.7724, 0. , ..., 0. , -0.5985, -0. ]], ..., [[ 0.0508, 0. , 0.0555, ..., 0.1478, 0. , 0. ], [ 0. , 0.1874, -0. , ..., -0. , -0.0986, 0. ], [ 0.2737, 0. , 0.3901, ..., 0.0457, 0. , 0. ], [-0. , -0. , -0. , ..., 0. , -0.9553, -0. ], [-0.2614, -0. , -0.4758, ..., 0. , 0. , 0.5351], [-0. , -0. , -0. , ..., 0. , -0.2955, -0. ]], [[ 0. , 0.3492, 0. , ..., 0. , 0.1478, 0. ], [ 0.4141, 0. , 0.3929, ..., -0. , -0. , 0. ], [ 0. , -0.3445, 0. , ..., 0. , 0.0457, 0. ], [-0.5885, -0. , -0.8011, ..., 0.9553, 0. , 0.3976], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0.8085, 0. , 0.5985, ..., 0.2955, 0. , 0.123 ]], [[ 0.2864, 0. , 0.2936, ..., 0.0615, 0. , 0. ], [ 0. , -0.0461, 0. , ..., -0. , -0.1238, 0. ], [ 0.0063, -0. , -0.0008, ..., 0.019 , 0. , 0. ], [-0. , 0.2687, -0. , ..., 0. , -0.3976, 0. ], [ 0.0642, 0. , 0.1169, ..., -0.5351, -0. , 0. ], [ 0. , -0.8687, 0. , ..., 0. , -0.123 , 0. ]]], [[[ 0. , -0.0235, 0. , ..., 0. , -0.0593, 0. ], [-0.143 , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0.0761, 0. , ..., 0. , 0.1916, 0. ], [ 0. , 0. , 0.0873, ..., -0.2797, -0. , -0.0295], [ 0. , -0.2955, -0. , ..., -0. , 0. , 0. ], [ 0. , -0. , -0.2823, ..., 0.904 , -0. , 0.0954]], [[-0.486 , -0. , -0.4643, ..., -0.1478, -0. , 0. ], [ 0. , -0.067 , 0. , ..., 0. , 0.2237, 0. ], [ 0. , -0. , -0.1436, ..., -0.0457, 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0.9553, 0. ], [ 0.2955, 0. , 0. , ..., 0.8085, -0. , -0.1987], [ 0. , 0. , 0. , ..., 0. , 0.2955, 0. ]], [[ 0. , 0.0198, 0. , ..., 0. , -0.0661, 0. ], [-0.1436, 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , -0.064 , 0. , ..., 0. , 0.2137, 0. ], [-0.0873, 0. , 0. , ..., -0.2389, -0. , 0.0587], [ 0. , -0. , 0. , ..., -0. , 0. , 0. ], [ 0.2823, -0. , 0. , ..., 0.7724, -0. , -0.1898]], ..., [[ 0. , -0.2899, -0. , ..., 0. , 0.2117, 0. ], [ 0.0685, -0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.3252, -0. , ..., -0. , -0.0723, 0. ], [ 0.2797, -0. , 0.2389, ..., 0. , 0. , -0.188 ], [ 0. , -0.8085, 0. , ..., 0. , 0. , -0. ], [-0.904 , -0. , -0.7724, ..., 0. , 0. , 0.0642]], [[-0.0357, -0. , -0.0661, ..., 0.0495, -0. , 0. ], [-0. , 0.2237, 0. , ..., -0. , -0.2237, 0. ], [ 0.0486, 0. , 0.2137, ..., -0.1601, 0. , 0. ], [ 0. , -0.9553, 0. , ..., -0. , 0. , -0. ], [-0. , 0. , -0. , ..., -0. , 0. , 0.1987], [ 0. , -0.2955, 0. , ..., -0. , 0. , -0. ]], [[-0. , 0.049 , -0. , ..., -0. , 0. , 0. ], [ 0.0962, 0. , 0.0965, ..., 0.0307, -0. , 0. ], [-0. , -0.008 , 0. , ..., -0. , 0. , 0. ], [ 0.0295, -0. , -0.0587, ..., 0.188 , 0. , 0. ], [-0. , 0.1987, -0. , ..., 0. , -0.1987, 0. ], [-0.0954, -0. , 0.1898, ..., -0.0642, 0. , 0. ]]], [[[-0.4835, -0. , -0.4763, ..., -0.1516, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.2226, 0. ], [-0.0962, 0. , -0.0965, ..., -0.0307, 0. , 0. ], [ 0. , -0. , 0. , ..., 0. , 0.9801, 0. ], [ 0. , -0. , 0. , ..., 0.8045, -0. , -0.1977], [ 0. , -0.1987, -0. , ..., 0. , 0.1987, 0. ]], [[-0. , 0.0158, -0. , ..., -0. , 0.0622, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0.0962, -0. , ..., -0. , -0.201 , 0. ], [ 0. , 0. , -0.0587, ..., 0.2687, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ], [ 0.1987, 0. , 0.1898, ..., -0.8687, 0. , 0. ]], [[-0.4335, -0. , -0.4265, ..., -0.1358, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.2192, 0. ], [-0.2348, -0. , -0.233 , ..., -0.0742, 0. , 0. ], [-0. , 0.0587, 0. , ..., 0. , 0.8776, 0. ], [ 0. , -0. , 0. , ..., 0.7924, -0. , -0.1947], [ 0. , -0.1898, 0. , ..., 0. , 0.4794, 0. ]], ..., [[ 0.0262, 0. , 0.0234, ..., 0.0074, -0. , 0. ], [-0. , 0.3958, -0. , ..., 0. , -0.1642, 0. ], [ 0.8781, 0. , 0.8728, ..., 0.2779, 0. , 0. ], [-0. , -0.2687, -0. , ..., 0. , -0.0481, 0. ], [-0.8045, -0. , -0.7924, ..., 0. , -0. , 0.8912], [-0. , 0.8687, -0. , ..., 0. , -1.7961, -0. ]], [[-0. , 0.4586, -0. , ..., 0. , -0.1686, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0.1742, 0. , ..., 0. , 0.3976, 0. ], [-0.9801, -0. , -0.8776, ..., 0.0481, 0. , 0.9752], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [-0.1987, -0. , -0.4794, ..., 1.7961, 0. , 0.0978]], [[ 0.4811, 0. , 0.4739, ..., 0.1509, -0. , 0. ], [-0. , -0.0973, -0. , ..., -0. , -0.2062, 0. ], [ 0.0483, 0. , 0.0475, ..., 0.0151, 0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.9752, 0. ], [ 0.1977, 0. , 0.1947, ..., -0.8912, 0. , 0. ], [-0. , -0. , -0. , ..., 0. , -0.0978, 0. ]]]], ..., [[[[ 0.1547, 0. , 0.1478, ..., -0.05 , 0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0.1676, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.3233, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ]], [[ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [-0. , -0. , -0.0457, ..., 0.1464, 0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , -0.9463, -0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ]], [[ 0.1478, 0. , 0.1547, ..., -0.091 , 0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0.1601, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.5885, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.8687], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ]], ..., [[-0.05 , -0. , -0.091 , ..., 0.1547, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.0542, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -1. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.294 ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0.2318, 0. , ..., 0. , 0.1547, 0. ], [ 0.4581, 0. , 0.5056, ..., -0. , -0. , 0. ], [ 0. , -0. , 0. , ..., -0. , -0. , 0. ], [-0.3233, -0. , -0.5885, ..., 1. , 0. , 0.4161], [-0. , 0.9463, -0. , ..., -0. , 0. , -0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]], [[-0.1539, -0. , -0.1516, ..., 0.0644, 0. , 0. ], [ 0. , -0.4401, 0. , ..., -0. , -0.068 , 0. ], [ 0. , -0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.4161, 0. ], [ 0.9093, 0. , 0.8687, ..., -0.294 , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [-0. , -0. , -0.0457, ..., 0.1464, 0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , -0.9463, -0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ]], [[ 0.1547, 0. , 0.1478, ..., -0.05 , 0. , 0. ], [ 0. , -0. , -0. , ..., 0. , 0. , 0. ], [-0. , 0. , 0.0457, ..., -0.1464, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.3233, -0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0.9463, 0. ]], [[ 0. , 0. , 0. , ..., -0. , 0.0495, 0. ], [ 0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.1601, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.2687], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.8687]], ..., [[-0. , -0. , -0. , ..., 0. , -0.1586, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0.0542, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.8605], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0.294 ]], [[-0.2358, -0. , -0.3049, ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [-0.4838, -0. , -0.5056, ..., 0. , 0. , 0. ], [-0. , -0.3233, -0. , ..., 0. , 0. , 0. ], [ 0.9463, 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , -0.9463, 0. , ..., 0. , 0. , 0. ]], [[ 0. , -0.0724, -0. , ..., 0. , -0.1991, 0. ], [ 0. , -0. , 0. , ..., 0. , -0. , 0. ], [-0. , 0.4401, -0. , ..., 0. , 0.068 , 0. ], [ 0. , 0. , 0.2687, ..., -0.8605, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , -0. , -0.8687, ..., 0.294 , -0. , -0. ]]], [[[ 0.1478, 0. , 0.1547, ..., -0.091 , 0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0.1601, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.5885, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.8687], [ 0. , 0. , 0. , ..., 0. , -0. , -0. ]], [[ 0. , 0. , 0. , ..., -0. , 0.0495, 0. ], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.1601, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.2687], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.8687]], [[ 0.1412, 0. , 0.1478, ..., -0.087 , 0. , 0. ], [-0. , -0. , -0. , ..., -0. , 0.1676, 0. ], [ 0.0437, 0. , 0.0457, ..., -0.0269, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.5622, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , 0.1739, -0. ]], ..., [[-0.0478, -0. , -0.087 , ..., 0.1478, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.0986, 0. ], [-0.0148, -0. , -0.0269, ..., 0.0457, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.9553, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.5351], [ 0. , 0. , 0. , ..., 0. , -0.2955, -0. ]], [[ 0. , 0.2849, 0. , ..., 0. , 0.1478, 0. ], [ 0.4141, 0. , 0.3929, ..., -0. , -0. , 0. ], [ 0. , 0.0469, 0. , ..., 0. , 0.0457, 0. ], [-0.5885, -0. , -0.5622, ..., 0.9553, 0. , 0.3976], [-0. , -0. , -0. , ..., -0. , 0. , 0. ], [ 0. , 0. , -0.1739, ..., 0.2955, 0. , 0.123 ]], [[-0.017 , -0. , -0.1448, ..., 0.0615, 0. , 0. ], [ 0. , -0.4419, 0. , ..., -0. , -0.1238, 0. ], [-0.0241, -0. , -0.0448, ..., 0.019 , 0. , 0. ], [ 0. , 0.2687, 0. , ..., 0. , -0.3976, 0. ], [ 0.8687, 0. , 0.9093, ..., -0.5351, -0. , 0. ], [ 0. , -0.8687, 0. , ..., 0. , -0.123 , 0. ]]], ..., [[[-0.05 , -0. , -0.091 , ..., 0.1547, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.0542, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -1. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.294 ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , -0. , -0. , ..., 0. , -0.1586, 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0.0542, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.8605], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , -0.294 ]], [[-0.0478, -0. , -0.087 , ..., 0.1478, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0.0986, 0. ], [-0.0148, -0. , -0.0269, ..., 0.0457, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.9553, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.5351], [ 0. , 0. , 0. , ..., 0. , -0.2955, -0. ]], ..., [[ 0.0162, 0. , 0.0294, ..., -0.05 , 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0.1676, 0. ], [ 0.0473, 0. , 0.0861, ..., -0.1464, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0.3233, -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , 0.9463, 0. ]], [[ 0. , -0.484 , 0. , ..., -0. , -0.05 , 0. ], [ 0.2928, 0. , 0.2501, ..., 0. , 0. , 0. ], [-0. , -0.0796, -0. , ..., -0. , -0.1464, 0. ], [ 1. , 0. , 0.9553, ..., -0.3233, 0. , -0.1345], [-0. , -0. , -0. , ..., -0. , 0. , -0. ], [-0. , 0. , 0.2955, ..., -0.9463, 0. , -0.3938]], [[-0.3667, -0. , -0.4107, ..., -0.0208, 0. , 0. ], [ 0. , 0.2108, 0. , ..., -0. , 0.2104, 0. ], [ 0.4286, 0. , 0.4207, ..., -0.0609, -0. , 0. ], [ 0. , -0.8605, 0. , ..., 0. , 0.1345, 0. ], [-0.294 , -0. , -0.5351, ..., 0.9093, 0. , 0. ], [-0. , 0.294 , 0. , ..., -0. , 0.3938, 0. ]]], [[[ 0. , 0.0754, 0. , ..., 0. , 0.1898, 0. ], [ 0.4581, 0. , 0.5056, ..., -0. , -0. , 0. ], [-0. , -0.0257, -0. , ..., -0. , -0.0648, 0. ], [ 0. , -0. , -0.2797, ..., 0.8955, 0. , 0.0945], [ 0. , 0.9463, 0. , ..., -0. , 0. , -0. ], [ 0. , -0. , 0.0955, ..., -0.3059, 0. , -0.0323]], [[-0.1547, -0. , -0.1478, ..., 0.05 , 0. , 0. ], [ 0. , 0.4323, 0. , ..., 0. , -0.1676, 0. ], [ 0. , -0. , -0.0457, ..., 0.1464, 0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0.3233, 0. ], [-0.9463, 0. , -0.8085, ..., -0. , -0. , 0.9093], [ 0. , 0. , 0. , ..., -0. , -0.9463, -0. ]], [[ 0. , -0.0634, 0. , ..., 0. , 0.2117, 0. ], [ 0.3456, 0. , 0.3929, ..., -0. , -0. , 0. ], [-0. , 0.0217, -0. , ..., -0. , -0.0723, 0. ], [ 0.2797, 0. , 0. , ..., 0.7651, 0. , -0.188 ], [-0. , 0.8085, 0. , ..., -0. , 0. , -0. ], [-0.0955, -0. , 0. , ..., -0.2614, 0. , 0.0642]], ..., [[-0. , 0.4091, -0. , ..., -0. , -0.1586, 0. ], [ 0.1464, -0. , 0.1251, ..., 0. , 0. , 0. ], [ 0. , -0.1398, 0. , ..., -0. , 0.0542, 0. ], [-0.8955, -0. , -0.7651, ..., 0. , 0. , 0.8605], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0.3059, 0. , 0.2614, ..., 0. , 0. , -0.294 ]], [[ 0.501 , 0. , 0.5166, ..., -0.1586, 0. , 0. ], [ 0. , -0.1676, 0. , ..., 0. , 0.1676, 0. ], [ 0.3932, 0. , 0.4333, ..., 0.0542, -0. , 0. ], [-0. , 0.3233, -0. , ..., -0. , 0. , -0. ], [-0. , 0. , -0. , ..., -0. , 0. , -0.9093], [-0. , 0.9463, -0. , ..., -0. , 0. , 0. ]], [[-0. , -0.2116, -0. , ..., -0. , 0. , 0. ], [-0.4401, -0. , -0.4419, ..., -0.1407, 0. , 0. ], [ 0. , -0.0887, 0. , ..., 0. , 0. , 0. ], [-0.0945, -0. , 0.188 , ..., -0.8605, 0. , 0. ], [ 0. , -0.9093, 0. , ..., 0. , 0.9093, -0. ], [ 0.0323, 0. , -0.0642, ..., 0.294 , -0. , -0. ]]], [[[-0.1539, -0. , -0.1516, ..., 0.0644, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , -0.1667, 0. ], [ 0.4401, 0. , 0.4419, ..., 0.1407, 0. , 0. ], [ 0. , 0. , -0. , ..., 0. , -0.4161, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.9048], [ 0. , 0.9093, -0. , ..., -0. , -0.9093, -0. ]], [[-0. , -0.0724, -0. , ..., -0. , -0.1991, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , 0.4401, 0. , ..., 0. , 0.068 , 0. ], [-0. , 0. , 0.2687, ..., -0.8605, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [-0.9093, 0. , -0.8687, ..., 0.294 , -0. , -0. ]], [[-0.2771, -0. , -0.2754, ..., 0.0199, 0. , 0. ], [ 0. , -0. , 0. , ..., 0. , -0.1642, 0. ], [ 0.375 , 0. , 0.3773, ..., 0.1534, 0. , 0. ], [ 0. , -0.2687, 0. , ..., 0. , -0.1288, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0.8912], [ 0. , 0.8687, 0. , ..., -0. , -0.9917, -0. ]], ..., [[ 0.4663, 0. , 0.4672, ..., 0.1123, 0. , 0. ], [-0. , 0. , -0. , ..., -0. , 0.0697, 0. ], [ 0.0034, -0. , 0.0006, ..., -0.1064, -0. , 0. ], [-0. , 0.8605, -0. , ..., 0. , -0.7259, -0. ], [ 0. , -0. , 0. , ..., 0. , 0. , -0.3784], [ 0. , -0.294 , 0. , ..., 0. , 0.6878, 0. ]], [[ 0. , -0.129 , 0. , ..., 0. , 0.2443, 0. ], [-0. , -0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0.4733, 0. , ..., -0. , -0.1515, 0. ], [ 0.4161, 0. , 0.1288, ..., 0.7259, 0. , -0.4141], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [ 0.9093, 0. , 0.9917, ..., -0.6878, 0. , -0.0415]], [[ 0.1532, 0. , 0.1509, ..., -0.0641, 0. , 0. ], [-0. , 0.4452, -0. , ..., 0. , 0.0876, 0. ], [ 0.0154, -0. , 0.0151, ..., -0.0064, -0. , 0. ], [-0. , -0. , -0. , ..., 0. , 0.4141, 0. ], [-0.9048, -0. , -0.8912, ..., 0.3784, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0.0415, 0. ]]]], [[[[-0. , -0.1086, -0. , ..., 0. , 0.1086, 0. ], [-0.2006, -0. , -0.2237, ..., 0.1676, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.995 ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [-0. , -0.2006, -0. , ..., 0. , 0.2006, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.0998], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , -0.0444, -0. , ..., 0. , 0.0444, 0. ], [-0.1916, -0. , -0.2137, ..., 0.1601, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9801], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , -0.1547, 0. , ..., 0. , 0.1547, 0. ], [ 0.0648, 0. , 0.0723, ..., -0.0542, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.4161], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [-0. , 0.2006, -0. , ..., -0. , -0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.0998], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[-0. , -0.4016, 0. , ..., -0. , 0. , 0. ], [ 0.1512, 0. , 0.1741, ..., -0.1822, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0.995 , 0. , 0.9801, ..., -0.4161, 0. , 0. ], [-0. , -0.0998, -0. , ..., 0. , 0.0998, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ]]], [[[-0. , -0. , -0. , ..., 0. , 0. , 0. ], [-0. , -0.2006, -0. , ..., 0. , 0.2006, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.0998], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , -0.1086, -0. , ..., 0. , 0.1086, 0. ], [-0. , -0. , -0. , ..., 0. , 0. , 0. ], [ 0. , 0.2006, 0. , ..., -0. , -0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.995 ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.0998]], [[-0.0593, -0. , -0.0661, ..., 0.0495, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0.1916, 0. , 0.2137, ..., -0.1601, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], ..., [[ 0.1898, 0. , 0.2117, ..., -0.1586, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [-0.0648, -0. , -0.0723, ..., 0.0542, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , 0.1086, -0. , ..., -0. , -0.1086, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0.2006, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.995 ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.0998]], [[ 0.4937, 0. , 0.5059, ..., 0.1372, -0. , 0. ], [-0. , -0. , 0. , ..., -0. , 0. , 0. ], [-0.072 , -0. , -0.1741, ..., 0.1822, 0. , 0. ], [ 0. , 0.995 , 0. , ..., -0. , -0.995 , 0. ], [-0.0998, -0. , 0. , ..., 0. , 0. , 0. ], [-0. , 0.0998, 0. , ..., -0. , -0.0998, 0. ]]], [[[-0. , -0.0444, -0. , ..., 0. , 0.0444, 0. ], [-0.1916, -0. , -0.2137, ..., 0.1601, -0. , 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9801], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0.0593, -0. , -0.0661, ..., 0.0495, -0. , 0. ], [-0. , -0. , -0. , ..., 0. , -0. , 0. ], [ 0.1916, 0. , 0.2137, ..., -0.1601, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[-0. , -0.0425, -0. , ..., 0. , 0.0425, 0. ], [-0.2006, -0. , -0.2237, ..., 0.1676, -0. , 0. ], [ 0. , -0.0131, 0. , ..., 0. , 0.0131, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9363], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.2896]], ..., [[ 0. , -0.1478, 0. , ..., 0. , 0.1478, 0. ], [ 0.118 , 0. , 0.1316, ..., -0.0986, -0. , 0. ], [-0. , -0.0457, -0. , ..., 0. , 0.0457, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.3976], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.123 ]], [[-0. , 0. , -0. , ..., 0. , -0. , 0. ], [-0. , 0.2237, -0. , ..., -0. , -0.2237, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.1987], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[-0. , -0.3903, 0. , ..., -0. , 0. , 0. ], [ 0.1481, 0. , 0.3158, ..., -0.1335, -0. , 0. ], [-0. , -0.052 , 0. , ..., -0. , -0. , 0. ], [ 0.9801, 0. , 0.9363, ..., -0.3976, 0. , 0. ], [-0. , -0. , -0. , ..., -0. , -0.1987, 0. ], [-0. , 0. , 0.2896, ..., -0.123 , 0. , 0. ]]], ..., [[[ 0. , -0.1547, 0. , ..., 0. , 0.1547, 0. ], [ 0.0648, 0. , 0.0723, ..., -0.0542, -0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.4161], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[ 0.1898, 0. , 0.2117, ..., -0.1586, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , -0. , 0. ], [-0.0648, -0. , -0.0723, ..., 0.0542, 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , -0.1478, 0. , ..., 0. , 0.1478, 0. ], [ 0.118 , 0. , 0.1316, ..., -0.0986, -0. , 0. ], [-0. , -0.0457, -0. , ..., 0. , 0.0457, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.3976], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.123 ]], ..., [[-0. , 0.05 , -0. , ..., 0. , -0.05 , 0. ], [-0.2006, -0. , -0.2237, ..., 0.1676, 0. , 0. ], [ 0. , 0.1464, 0. , ..., -0. , -0.1464, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.1345], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.3938]], [[ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.1676, 0. , ..., 0. , 0.1676, 0. ], [-0. , 0. , -0. , ..., 0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , 0.173 , -0. , ..., -0. , 0. , 0. ], [-0.0989, -0. , -0.0624, ..., -0.0709, 0. , 0. ], [ 0. , -0.0501, 0. , ..., 0. , 0. , 0. ], [-0.4161, -0. , -0.3976, ..., 0.1345, 0. , 0. ], [ 0. , 0. , -0. , ..., 0. , 0.9093, -0. ], [ 0. , -0. , -0.123 , ..., 0.3938, -0. , -0. ]]], [[[-0. , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.2006, -0. , ..., -0. , -0.2006, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.0998], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], [[-0. , 0.1086, -0. , ..., -0. , -0.1086, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , -0.2006, 0. , ..., 0. , 0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.995 ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.0998]], [[-0. , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.2237, -0. , ..., -0. , -0.2237, 0. ], [ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0.1987], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ]], ..., [[ 0. , -0. , 0. , ..., 0. , 0. , 0. ], [ 0. , -0.1676, 0. , ..., 0. , 0.1676, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.9093], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , -0.1086, 0. , ..., 0. , 0.1086, 0. ], [-0. , 0. , -0. , ..., -0. , -0. , 0. ], [-0. , 0.2006, -0. , ..., -0. , -0.2006, 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.995 ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , -0.0998]], [[-0.5217, -0. , -0.5282, ..., -0.1205, 0. , 0. ], [ 0. , 0.2413, 0. , ..., -0. , -0. , 0. ], [ 0.3508, 0. , 0.3966, ..., -0.3489, -0. , 0. ], [ 0. , -0.995 , 0. , ..., 0. , 0.995 , 0. ], [ 0.0998, 0. , -0.1987, ..., 0.9093, -0. , 0. ], [ 0. , -0.0998, 0. , ..., -0. , 0.0998, 0. ]]], [[[-0. , 0.0801, -0. , ..., -0. , -0.108 , 0. ], [ 0.1512, 0. , 0.1741, ..., -0.1822, -0. , 0. ], [ 0. , 0.0792, 0. , ..., 0. , 0.1996, 0. ], [ 0. , 0. , 0.0295, ..., -0.0945, 0. , 0.99 ], [ 0. , -0.0998, -0. , ..., 0. , 0.0998, -0. ], [ 0. , -0. , -0.294 , ..., 0.9416, -0. , 0.0993]], [[ 0.02 , 0. , 0.0223, ..., -0.0167, -0. , 0. ], [ 0. , 0.0309, 0. , ..., 0. , 0.2104, 0. ], [-0.1996, -0. , -0.2226, ..., 0.1667, 0. , 0. ], [-0. , 0. , -0. , ..., 0. , 0. , 0. ], [ 0.0998, 0. , -0.1987, ..., 0.9093, -0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[-0. , 0.0908, 0. , ..., -0. , -0.1064, 0. ], [ 0.2927, 0. , 0.3158, ..., -0.1335, -0. , 0. ], [ 0. , -0.0406, 0. , ..., 0. , 0.1966, 0. ], [-0.0295, 0. , 0. , ..., -0.0807, -0. , 0.9752], [ 0. , 0.1987, 0. , ..., -0. , -0.1987, -0. ], [ 0.294 , -0. , 0. , ..., 0.8045, 0. , 0.0978]], ..., [[-0. , -0.0716, -0. , ..., -0. , 0.0452, 0. ], [-0.5236, -0. , -0.535 , ..., -0.0709, -0. , 0. ], [ 0. , 0.3469, 0. , ..., 0. , -0.0835, 0. ], [ 0.0945, -0. , 0.0807, ..., 0. , 0. , -0.4141], [-0. , -0.9093, 0. , ..., 0. , 0.9093, 0. ], [-0.9416, -0. , -0.8045, ..., 0. , -0. , -0.0415]], [[-0.02 , -0. , -0.0223, ..., 0.0167, -0. , 0. ], [-0. , -0.0309, -0. , ..., -0. , -0.2104, 0. ], [ 0.1996, 0. , 0.2226, ..., -0.1667, -0. , 0. ], [-0. , 0. , 0. , ..., -0. , 0. , -0. ], [-0.0998, 0. , 0.1987, ..., -0.9093, 0. , 0. ], [ 0. , 0. , -0. , ..., 0. , 0. , -0. ]], [[-0. , 0.3996, -0. , ..., 0. , -0. , 0. ], [-0.2006, -0. , -0.2237, ..., 0.1676, 0. , 0. ], [ 0. , 0.0401, 0. , ..., -0. , -0. , 0. ], [-0.99 , -0. , -0.9752, ..., 0.4141, 0. , 0. ], [ 0. , 0. , 0. , ..., -0. , 0. , 0. ], [-0.0993, -0. , -0.0978, ..., 0.0415, 0. , 0. ]]]], [[[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]], ..., [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]], [[[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], ..., [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]], [[ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ], [ 0. , 0. , 0. , ..., 0. , 0. , 0. ]]]]], shape=(7, 7, 7, 6, 7))
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part II: Acceleration and Advanced Applications.” arXiv preprint arXiv:2207.01794 (2022).
- pay(W, q=None, J=None, frame=1)
Generalised joint force/torque due to a payload wrench
- Parameters:
W (
Union[ndarray,List[float],Tuple[float,...]]) – A wrench vector applied at the end effector, W = [Fx Fy Fz Mx My Mz]J (
ndarray|None) – The manipulator Jacobian (Optional, if not supplied will use the q value).frame (
int) – The frame in which to torques are expressed in when J is not supplied. 0 means base frame of the robot, 1 means end- effector frame
- Returns:
Joint forces/torques due to W
- Return type:
ndarray(n,)
tau = pay(W, J) Returns the generalised joint force/torques due to a payload wrench W applied to the end-effector. Where the manipulator Jacobian is J (6xn), and n is the number of robot joints.
tau = pay(W, q, frame) as above but the Jacobian is calculated at pose q in the frame given by frame which is 0 for base frame, 1 for end-effector frame.
Uses the formula tau = J’W, where W is a wrench vector applied at the end effector, W = [Fx Fy Fz Mx My Mz]’.
- Trajectory operation:
In the case q is nxm or J is 6xnxm then tau is nxm where each row is the generalised force/torque at the pose given by corresponding row of q.
Notes
- Wrench vector and Jacobian must be from the same reference
frame.
Tool transforms are taken into consideration when frame=1.
- Must have a constant wrench - no trajectory support for this
yet.
- paycap(w, tauR, frame=1, q=None)
Static payload capacity of a robot
- Parameters:
w (
ndarray) – The payload wrenchtauR (
ndarray) – Joint torque matrix minimum and maximumsframe (
int) – The frame in which to torques are expressed in when J is not supplied. ‘base’ means base frame of the robot, ‘ee’ means end-effector frameq (
Union[ndarray,List[float],Tuple[float,...],None]) – Joint coordinates
- Returns:
The maximum permissible payload wrench
- Return type:
ndarray(6,)
wmax, joint = paycap(q, w, f, tauR)returns the maximum permissible payload wrenchwmax(6) applied at the end-effector, and the index of the joint (zero indexed) which hits its force/torque limit at that wrench.q(n) is the manipulator pose,wthe payload wrench (6),fthe wrench reference frame and tauR (nx2) is a matrix of joint forces/torques (first col is maximum, second col minimum).Trajectory operation:
In the case q is nxm then wmax is Mx6 and J is Mx1 where the rows are the results at the pose given by corresponding row of q.
Notes
Wrench vector and Jacobian must be from the same reference frame
Tool transforms are taken into consideration for frame=1.
- payload(m, p=array([0., 0., 0.]))
Add a payload to the end-effector
- Parameters:
m (
float) – mass (kg)p (ndarray(3,)) – position in end-effector frame
payload(m, p) adds payload mass adds a payload with point mass m at position p in the end-effector coordinate frame.
payload(m) adds payload mass adds a payload with point mass m at in the end-effector coordinate frame.
payload(0) removes added payload.
- perturb(p=0.1)
Perturb robot parameters
- Parameters:
p – The percent (+/-) to be perturbed. Default 10%
- Returns:
A copy of the robot with dynamic parameters perturbed
rp = perturb(p) is a new robot object in which the dynamic parameters (link mass and inertia) have been perturbed. The perturbation is multiplicative so that values are multiplied by random numbers in the interval (1-p) to (1+p). The name string of the perturbed robot is prefixed by ‘P/’.
Useful for investigating the robustness of various model-based control schemes. For example to vary parameters in the range +/- 10 percent is: r2 = puma.perturb(0.1)
- plot(q, backend=None, block=False, dt=0.05, limits=None, vellipse=False, fellipse=False, fig=None, movie=None, loop=False, **kwargs)
Graphical display and animation
robot.plot(q, 'pyplot')displays a graphical view of a robot based on the kinematic model and the joint configurationq. This is a stick figure polyline which joins the origins of the link coordinate frames. The plot will autoscale with an aspect ratio of 1.If
q(m,n) representing a joint-space trajectory it will create an animation with a pause ofdtseconds between each frame.- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – The joint configuration of the robot.backend (
Optional[Literal['swift','pyplot','pyplot2']]) – The graphical backend to use, currently ‘swift’ and ‘pyplot’ are implemented. Defaults to ‘swift’ of aRobotand ‘pyplot` for aDHRobotblock (
bool) – Block operation of the code and keep the figure opendt (
float) – if q is a trajectory, this describes the delay in seconds between frameslimits (
Union[ndarray,List[float],Tuple[float,...],None]) – Custom view limits for the plot. If not supplied will autoscale, [x1, x2, y1, y2, z1, z2] (this option is for ‘pyplot’ only)vellipse (
bool) – (Plot Option) Plot the velocity ellipse at the end-effector (this option is for ‘pyplot’ only)fellipse (
bool) – (Plot Option) Plot the force ellipse at the end-effector (this option is for ‘pyplot’ only)fig (
str|None) – (Plot Option) The figure label to plot in (this option is for ‘pyplot’ only)movie (
str|None) – (Plot Option) The filename to save the movie to (this option is for ‘pyplot’ only)loop (
bool) – (Plot Option) Loop the movie (this option is for ‘pyplot’ only)jointaxes – (Plot Option) Plot an arrow indicating the axes in which the joint revolves around(revolute joint) or translates along (prosmatic joint) (this option is for ‘pyplot’ only)
eeframe – (Plot Option) Plot the end-effector coordinate frame at the location of the end-effector. Uses three arrows, red, green and blue to indicate the x, y, and z-axes. (this option is for ‘pyplot’ only)
shadow – (Plot Option) Plot a shadow of the robot in the x-y plane. (this option is for ‘pyplot’ only)
name – (Plot Option) Plot the name of the robot near its base (this option is for ‘pyplot’ only)
render_mode – (Plot Option) Rendering mode for matplotlib backends:
'window','notebook-widget', or'notebook-inline'. If omitted, an environment-appropriate mode is selected.inline_every_n – (Plot Option) In notebook-inline mode, push one rendered frame every N simulation steps. Larger N reduces output load.
inline_format – (Plot Option) In notebook-inline mode, frame format:
'svg'(default) or'png'.inline_dpi – (Plot Option) DPI for PNG inline frames only; ignored when
inline_format='svg'.
- Return type:
Connector- Returns:
A reference to the environment object which controls the figure
Notes
- By default this method will block until the figure is dismissed.
To avoid this set
block=False.
- For PyPlot, the polyline joins the origins of the link frames,
but for some Denavit-Hartenberg models those frames may not actually be on the robot, ie. the lines to not neccessarily represent the links of the robot.
See also
- plot_ellipse(ellipse, block=True, limits=None, jointaxes=True, eeframe=True, shadow=True, name=True)
Plot an ellipsoid.
- Parameters:
ellipse (
EllipsePlot) – the ellipsoid to plotblock (
bool) – block operation of the code and keep the figure openlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedjointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_ellipse(ellipsoid)displays the ellipsoid.
- plot_fellipse(q, block=True, fellipse=None, limits=None, opt='trans', centre='ee', jointaxes=True, eeframe=True, shadow=True, name=True)
Plot the force ellipsoid for a manipulator.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – the joint configuration of the robotblock (
bool) – block operation of the code and keep the figure openfellipse (
EllipsePlot|None) – a pre-built force ellipsoid to plotlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational force ellipsoidcentre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – coordinates to plot the ellipse —[x, y, z]or"ee"jointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Raises:
ValueError – if neither
qnorfellipseis supplied- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_fellipse(q)displays the force ellipsoid for the robot at poseq. The plot will autoscale with an aspect ratio of 1.robot.plot_fellipse(vellipse=ell)uses a pre-built ellipse object.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the origin. Use
centreto specify a 3-vector, or"ee"to draw at the end-effector.
- plot_vellipse(q, block=True, vellipse=None, limits=None, opt='trans', centre='ee', jointaxes=True, eeframe=True, shadow=True, name=True)
Plot the velocity ellipsoid for a manipulator.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – the joint configuration of the robotblock (
bool) – block operation of the code and keep the figure openvellipse (
EllipsePlot|None) – a pre-built velocity ellipsoid to plotlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational velocity ellipsoidcentre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – coordinates to plot the ellipse —[x, y, z]or"ee"jointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Raises:
ValueError – if neither
qnorvellipseis supplied- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_vellipse(q)displays the velocity ellipsoid for the robot at poseq. The plot will autoscale with an aspect ratio of 1.robot.plot_vellipse(vellipse=ell)uses a pre-built ellipse object.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the origin. Use
centreto specify a 3-vector, or"ee"to draw at the end-effector.
- property prismaticjoints: list[bool]
Revolute joints as bool array
- Returns:
array of joint type, True if prismatic
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.prismaticjoints [False, False, False, False, False, False] >>> stanford = rtb.models.DH.Stanford() >>> stanford.prismaticjoints [False, False, True, False, False, False]
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
See also
Link.isprismatic(),revolutejoints()
- property q: ndarray
Get/set robot joint configuration
robot.qis the robot joint configurationrobot.q = ...checks and sets the joint configuration
- Parameters:
q – the new robot joint configuration
- Returns:
robot joint configuration
- property qd: ndarray
Get/set robot joint velocity
robot.qdis the robot joint velocityrobot.qd = ...checks and sets the joint velocity
- Returns:
robot joint velocity
- property qdd: ndarray
Get/set robot joint acceleration
robot.qddis the robot joint accelerationrobot.qdd = ...checks and sets the robot joint acceleration
- Returns:
robot joint acceleration
- property qlim: ndarray
Joint limits
Limits are extracted from the link objects. If joints limits are not set for:
a revolute joint [-𝜋. 𝜋] is returned
a prismatic joint an exception is raised
- Parameters:
qlim – An array of joints limits (2, n)
- Raises:
ValueError – unset limits for a prismatic joint
- Returns:
Array of joint limit values
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.qlim array([[-2.7925, -1.9199, -2.3562, -4.6426, -1.7453, -4.6426], [ 2.7925, 1.9199, 2.3562, 4.6426, 1.7453, 4.6426]])
- random_q()
Return a random joint configuration
The value for each joint is uniform randomly distributed between the limits set for the robot.
Notes
The joint limit for all joints must be set.
- Returns:
Random joint configuration :rtype: ndarray(n)
See also
Robot.qlim(),Link.qlim()
- property revolutejoints: list[bool]
Revolute joints as bool array
- Returns:
array of joint type, True if revolute
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.revolutejoints [True, True, True, True, True, True] >>> stanford = rtb.models.DH.Stanford() >>> stanford.revolutejoints [True, True, False, True, True, True]
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
See also
Link.isrevolute(),prismaticjoints()
- segments()
Segments of branched robot
For a single-chain robot with structure:
L1 - L2 - L3
the return is
[[None, L1, L2, L3]]For a robot with structure:
L1 - L2 +- L3 - L4 +- L5 - L6
the return is
[[None, L1, L2], [L2, L3, L4], [L2, L5, L6]]Notes
the length of the list is the number of segments in the robot
- the first segment always starts with
Nonewhich represents the base transform (since there is no base link)
- the first segment always starts with
- the last link of one segment is also the first link of subsequent
segments
- showgraph(display_graph=True, **kwargs)
Display a link transform graph in browser
robot.showgraph()displays a graph of the robot’s link frames and the ETS between them. It uses GraphViz dot.- The nodes are:
Base is shown as a grey square. This is the world frame origin, but can be changed using the
baseattribute of the robot.Link frames are indicated by circles
ETS transforms are indicated by rounded boxes
- The edges are:
an arrow if
jtypeis False or the joint is fixedan arrow with a round head if
jtypeis True and the joint is revolutean arrow with a box head if
jtypeis True and the joint is prismatic
Edge labels or nodes in blue have a fixed transformation to the preceding link.
- Parameters:
display_graph (
bool) – Open the graph in a browser if True. Otherwise will return the file pathetsbox – Put the link ETS in a box, otherwise an edge label
jtype – Arrowhead to node indicates revolute or prismatic type
static – Show static joints in blue and bold
- Return type:
Examples
>>> import roboticstoolbox as rtb >>> panda = rtb.models.URDF.Panda() >>> panda.showgraph()

See also
- property structure: str
Return the joint structure string
A string with one letter per joint:
Rfor a revolute joint, andPfor a prismatic joint.- Returns:
joint configuration string
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.structure 'RRRRRR' >>> stanford = rtb.models.DH.Stanford() >>> stanford.structure 'RRPRRR'
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
len(self.structure) == self.n.
- teach(q, block=True, limits=None, vellipse=False, fellipse=False, backend=None)
Graphical teach pendant
robot.teach(q)creates a matplotlib plot which allows the user to “drive” a graphical robot using a graphical slider panel. The robot’s inital joint configuration isq. The plot will autoscale with an aspect ratio of 1.robot.teach()as above except the robot’s stored value ofqis used.- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – The joint configuration of the robot (Optional, if not supplied will use the stored q values).block (
bool) – Block operation of the code and keep the figure openlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – Custom view limits for the plot. If not supplied will autoscale, [x1, x2, y1, y2, z1, z2]vellipse (
bool) – (Plot Option) Plot the velocity ellipse at the end-effector (this option is for ‘pyplot’ only)fellipse (
bool) – (Plot Option) Plot the force ellipse at the end-effector (this option is for ‘pyplot’ only)
- Return type:
Connector- Returns:
A reference to the PyPlot object which controls the matplotlib figure
Notes
Program execution is blocked until the teach window is dismissed. If
block=Falsethe method is non-blocking but you need to poll the window manager to ensure that the window remains responsive.The slider limits are derived from the joint limit properties. If not set then:
For revolute joints they are assumed to be [-pi, +pi]
For prismatic joint they are assumed unknown and an error occurs.
- todegrees(q)
Convert joint angles to degrees
- Parameters:
q – The joint configuration of the robot
- Return type:
- Returns:
a vector of joint coordinates in degrees and metres
- Returns:
robot.todegrees(q)converts joint coordinatesqto degrees- Returns:
taking into account whether elements of
qcorrespond to revolute- Returns:
or prismatic joints, ie. prismatic joint values are not converted.
- Returns:
If
qis a matrix, with one column per joint, the conversion is- Returns:
performed columnwise.
Examples
>>> import roboticstoolbox as rtb >>> from math import pi >>> stanford = rtb.models.DH.Stanford() >>> stanford.todegrees([pi/4, pi/8, 2, -pi/4, pi/6, pi/3]) array([ 45. , 22.5, 2. , -45. , 30. , 60. ])
- property tool: SE3
Get/set robot tool transform
robot.toolis the robot tool transform as an SE3 objectrobot._toolis the robot tool transform as a numpy arrayrobot.tool = ...checks and sets the robot tool transform
- Parameters:
tool – the new robot tool transform (as an SE(3))
- Returns:
robot tool transform
- toradians(q)
Convert joint angles to radians
robot.toradians(q)converts joint coordinatesqto radians taking into account whether elements ofqcorrespond to revolute or prismatic joints, ie. prismatic joint values are not converted.If
qis a matrix, with one column per joint, the conversion is performed columnwise.- Parameters:
q – The joint configuration of the robot
- Return type:
- Returns:
a vector of joint coordinates in radians and metres
Examples
>>> import roboticstoolbox as rtb >>> stanford = rtb.models.DH.Stanford() >>> stanford.toradians([10, 20, 2, 30, 40, 50]) array([0.1745, 0.3491, 2. , 0.5236, 0.6981, 0.8727])
- vellipse(q, opt='trans', unit='rad', centre='ee', scale=0.1, add=True)
Create a velocity ellipsoid object for plotting with PyPlot.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – the joint configuration of the robotopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational velocity ellipsoidunit (
Literal['rad','deg']) –'rad'or'deg'centre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – centre of the ellipsoid —'ee'for the end-effector or a 3-vector[x, y, z]in the world framescale (
float) – scale factor for the ellipsoidadd (
bool) – ifTrue, add the ellipsoid to the active plot environment
- Returns:
an EllipsePlot object
- Return type:
EllipsePlot
robot.vellipse(q)creates a velocity ellipsoid for the robot at poseq. By default the ellipsoid is centered at the end-effector.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the end-effector. The option
centreallows its origin to be set to the specified 3-vector, or the string"ee"ensures it is drawn at the end-effector position.
- class roboticstoolbox.robot.Robot.Robot2(arg, **kwargs)[source]
Bases:
BaseRobot[Link2]- __getitem__(i)
Get link
This also supports iterating over each link in the robot object, from the base to the tool.
- Parameters:
- Return type:
- Returns:
i’th link or named link
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> print(robot[1]) # print the 2nd link RevoluteDH: θ=q, d=0, a=0.4318, ⍺=0.0 >>> print([link.a for link in robot]) # print all the a_j values [0, 0.4318, 0.0203, 0, 0, 0]
Notes
Robotsupports link lookup by name,eg.
robot['link1']
- __str__()
Pretty prints the ETS Model of the robot.
- Return type:
- Returns:
Pretty print of the robot model
Notes
Constant links are shown in blue.
End-effector links are prefixed with an @
Angles in degrees
- The robot base frame is denoted as
BASEand is equal to the robot’s
baseattribute.
- The robot base frame is denoted as
- accel(q, qd, torque, gravity=None)
Compute acceleration due to applied torque
- Parameters:
- Returns:
Joint accelerations
- Return type:
ndarray(n,)
qdd = accel(q, qd, torque)calculates a vector (n) of joint accelerations that result from applying the actuator force/torque (n) to the manipulator in stateq(n) andqd(n), andnis the number of robot joints.\[\ddot{q} = \mathbf{M}^{-1} \left(\tau - \mathbf{C}(q)\dot{q} - \mathbf{g}(q)\right)\]Trajectory operation
If
q,qd, torque are matrices (m,n) thenqddis a matrix (m,n) where each row is the acceleration corresponding to the equivalent rows of q, qd, torque.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.accel(puma.qz, 0.5 * np.ones(6), np.zeros(6)) array([ -7.5544, -12.22 , -6.4022, -5.4303, -4.9518, -2.1178])
Notes
- Useful for simulation of manipulator dynamics, in
conjunction with a numerical integration function.
- Uses the method 1 of Walker and Orin to compute the forward
dynamics.
- Featherstone’s method is more efficient for robots with large
numbers of joints.
Joint friction is considered.
References
- Efficient dynamic computer simulation of robotic mechanisms,
M. W. Walker and D. E. Orin, ASME Journal of Dynamic Systems, Measurement and Control, vol. 104, no. 3, pp. 205-211, 1982.
- accel_x(q, xd, wrench, gravity=None, pinv=False, representation='rpy/xyz')
Operational space acceleration due to applied wrench
- Parameters:
xd (ndarray(6,)) – Operational space velocity of the end-effector
wrench (ndarray(6,)) – Wrench applied to the end-effector
gravity – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the
gravityattribute of selfpinv – use pseudo inverse rather than inverse
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'
- Returns:
Operational space accelerations of the end-effector
- Return type:
ndarray(6,)
xdd = accel_x(q, qd, wrench)is the operational space acceleration due towrenchapplied to the end-effector of a robot in joint configurationqand joint velocityqd.\[\ddot{x} = \mathbf{J}(q) \mathbf{M}(q)^{-1} \left( \mathbf{J}(q)^T w - \mathbf{C}(q)\dot{q} - \mathbf{g}(q) \right)\]Trajectory operation
If
q,qd, torque are matrices (m,n) thenqddis a matrix (m,n) where each row is the acceleration corresponding to the equivalent rows of q, qd, wrench.Notes
- Useful for simulation of manipulator dynamics, in
conjunction with a numerical integration function.
- Uses the method 1 of Walker and Orin to compute the forward
dynamics.
- Featherstone’s method is more efficient for robots with large
numbers of joints.
Joint friction is considered.
See also
- addconfiguration(name, q)
Add a named joint configuration
Add a named configuration to the robot instance’s dictionary of named configurations.
- Parameters:
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.addconfiguration_attr("mypos", [0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.configs["mypos"] array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6])
See also
- addconfiguration_attr(name, q, unit='rad')
Add a named joint configuration as an attribute
- Parameters:
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.addconfiguration_attr("mypos", [0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.mypos array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6]) >>> robot.configs["mypos"] array([0.1, 0.2, 0.3, 0.4, 0.5, 0.6])
Notes
Used in robot model init method to store the
qrconfiguration- Dynamically adding attributes to objects can cause issues with
Python type checking.
- Configuration is also added to the robot instance’s dictionary of
named configurations.
See also
- attach(object)
- attach_to(object)
- property base_link: LinkType
Get the robot base link
robot.base_linkis the robot base link
- Returns:
the first link in the robot tree
- cinertia(q)
Deprecated, use
inertia_x
- property comment: str
Get/set robot comment
robot.commentis the robot commentrobot.comment = ...checks and sets the robot comment
- Parameters:
name – the new robot comment
- Returns:
robot comment
- configurations_str(border='thin')
- property control_mode: str
Get/set robot control mode
robot.control_typeis the robot control moderobot.control_type = ...checks and sets the robot control mode
- Parameters:
control_mode – the new robot control mode
- Returns:
the current robot control mode
- copy()
- coriolis(q, qd)
Coriolis and centripetal term
- Parameters:
- Returns:
Coriolis/centripetal velocity matrix
- Return type:
coriolis(q, qd)calculates the Coriolis/centripetal matrix (n,n) for the robot in configurationqand velocityqd, wherenis the number of joints.The product \(\mathbf{C} \dot{q}\) is the vector of joint force/torque due to velocity coupling. The diagonal elements are due to centripetal effects and the off-diagonal elements are due to Coriolis effects. This matrix is also known as the velocity coupling matrix, since it describes the disturbance forces on any joint due to velocity of all other joints.
Trajectory operation
If
qandqdare matrices (m,n), each row is interpretted as a joint configuration, and the result (n,n,m) is a 3d-matrix where each plane corresponds to a row ofqandqd.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.coriolis(puma.qz, 0.5 * np.ones((6,))) array([[-0.4017, -0.5513, -0.2025, -0.0007, -0.0013, 0. ], [ 0.2023, -0.1937, -0.3868, -0. , -0.002 , 0. ], [ 0.1987, 0.193 , -0. , 0. , -0.0001, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ], [ 0.0007, 0.0007, 0.0001, 0. , 0. , 0. ], [ 0. , 0. , 0. , 0. , 0. , 0. ]])
Notes
- Joint viscous friction is also a joint force proportional to
velocity but it is eliminated in the computation of this value.
Computationally slow, involves \(n^2/2\) invocations of RNE.
- coriolis_x(q, qd, pinv=False, representation='rpy/xyz', J=None, Ji=None, Jd=None, C=None, Mx=None)
Operational space Coriolis and centripetal term
- Parameters:
pinv – use pseudo inverse rather than inverse (Default value = False)
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'J (ndarray(6,n)) – pre-computed analytical Jacobian (optional)
Ji (ndarray(n,6)) – pre-computed inverse analytical Jacobian (optional)
Jd (ndarray(6,n)) – pre-computed time-derivative of analytical Jacobian (optional)
C (ndarray(n,n)) – pre-computed joint-space Coriolis matrix (optional)
Mx (ndarray(6,6)) – pre-computed operational-space inertia matrix (optional)
- Returns:
Operational space velocity matrix
- Return type:
ndarray(6,6)
coriolis_x(q, qd)is the Coriolis/centripetal matrix (m,m) in operational space for the robot in configurationqand velocityqd, wherenis the number of joints.\[\mathbf{C}_x = \mathbf{J}(q)^{-T} \left( \mathbf{C}(q) - \mathbf{M}_x(q) \mathbf{J})(q) \right) \mathbf{J}(q)^{-1}\]The product \(\mathbf{C} \dot{x}\) is the operational space wrench due to joint velocity coupling. This matrix is also known as the velocity coupling matrix, since it describes the disturbance forces on any joint due to velocity of all other joints.
The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If
qandqdare matrices (m,n), each row is interpretted as a joint configuration, and the result (n,n,m) is a 3d-matrix where each plane corresponds to a row ofqandqd.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.coriolis_x(puma.qn, 0.5 * np.ones((6,))) array([[-1.1492e+17, -3.4409e+17, -1.1492e+17, 1.7076e+15, 5.0074e+11, 1.7076e+15], [-9.0565e+13, -7.2695e+16, -9.0565e+13, 6.9150e+14, -2.2021e+15, 6.9150e+14], [ 1.6320e+17, 3.6514e+17, 1.6320e+17, -1.0105e+15, -5.5014e+11, -1.0105e+15], [ 3.6712e+15, 9.7095e+15, 3.6712e+15, 8.9640e-01, -9.2846e+14, 1.2846e+00], [ 5.7439e+14, 5.7182e+15, 5.7439e+14, -4.0981e+14, 5.0175e-02, -4.0981e+14], [ 3.6712e+15, 9.7095e+15, 3.6712e+15, 8.9640e-01, -9.2846e+14, 1.2846e+00]])
Notes
- Joint viscous friction is also a joint force proportional to
velocity but it is eliminated in the computation of this value.
Computationally slow, involves \(n^2/2\) invocations of RNE.
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
coriolis(),inertia_x(),hessian0()
- property default_backend
Get default graphical backend
robot.default_backendGet the default graphical backend, used whenno explicit backend is passed to
Robot.plot.
robot.default_backend = ...Set the default graphical backend, used whenno explicit backend is passed to
Robot.plot. The default set here will be overridden if the particularRobotsubclass cannot support it.
- Returns:
backend name
- dfs_links(start, func=None)
A link search method
Visit all links from start in depth-first order and will apply func to each visited link
- Parameters:
start – The link to start at
func – An optional function to apply to each link as it is found
- Returns:
A list of links
- dotfile(filename, etsbox=False, ets='full', jtype=False, static=True)
Write a link transform graph as a GraphViz dot file
The file can be processed using dot:
% dot -Tpng -o out.png dotfile.dot
The nodes are:
Base is shown as a grey square. This is the world frame origin, but can be changed using the
baseattribute of the robot.Link frames are indicated by circles
ETS transforms are indicated by rounded boxes
The edges are:
an arrow if
jtypeis False or the joint is fixedan arrow with a round head if
jtypeis True and the joint is revolutean arrow with a box head if
jtypeis True and the joint is prismatic
Edge labels or nodes in blue have a fixed transformation to the preceding link.
Notes
If
filenameis a file object then the file will not be closed after the GraphViz model is written.- Parameters:
file – Name of file to write to
etsbox (
bool) – Put the link ETS in a box, otherwise an edge labelets (
Literal['full','brief']) – Display the full ets with “full” or a brief version with “brief”jtype (
bool) – Arrowhead to node indicates revolute or prismatic typestatic (
bool) – Show static joints in blue and bold
See also
- dynamics()
Pretty print the dynamic parameters (Robot superclass)
The dynamic parameters (inertial and friction) are printed in a table, with one row per link.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.dynamics() ┌───────┬───────┬─────────────────────────┬────────────────────────────────────────┬──────────┬───────────┬───────────────────┬───────┐ │ j │ m │ r │ I │ Jm │ B │ Tc │ G │ ├───────┼───────┼─────────────────────────┼────────────────────────────────────────┼──────────┼───────────┼───────────────────┼───────┤ │ link1 │ 0 │ 0, 0, 0 │ 0, 0.35, 0, 0, 0, 0 │ 0.0002 │ 0.00148 │ 0.395, -0.435 │ -62.6 │ │ link2 │ 17.4 │ -0.364, 0.006, 0.228 │ 0.13, 0.524, 0.539, 0, 0, 0 │ 0.0002 │ 0.000817 │ 0.126, -0.071 │ 108 │ │ link3 │ 4.8 │ -0.0203, -0.0141, 0.07 │ 0.066, 0.086, 0.0125, 0, 0, 0 │ 0.0002 │ 0.00138 │ 0.132, -0.105 │ -53.7 │ │ link4 │ 0.82 │ 0, 0.019, 0 │ 0.0018, 0.0013, 0.0018, 0, 0, 0 │ 3.3e-05 │ 7.12e-05 │ 0.0112, -0.0169 │ 76 │ │ link5 │ 0.34 │ 0, 0, 0 │ 0.0003, 0.0004, 0.0003, 0, 0, 0 │ 3.3e-05 │ 8.26e-05 │ 0.00926, -0.0145 │ 71.9 │ │ link6 │ 0.09 │ 0, 0, 0.032 │ 0.00015, 0.00015, 4e-05, 0, 0, 0 │ 3.3e-05 │ 3.67e-05 │ 0.00396, -0.0105 │ 76.7 │ └───────┴───────┴─────────────────────────┴────────────────────────────────────────┴──────────┴───────────┴───────────────────┴───────┘
- dynamics_list()
Print dynamic parameters (Robot superclass)
Display the kinematic and dynamic parameters to the console in reable format
- dynchanged(what=None)
Dynamic parameters have changed
Called from a property setter to inform the robot that the cache of dynamic parameters is invalid.
See also
roboticstoolbox.Link._dirties_frne()
- ets(start=None, end=None)
Robot to ETS
robot.ets()is an ETS representing the kinematics from base to end-effector.robot.ets(end=link)is an ETS representing the kinematics from base to the linklinkspecified as a Link reference or a name.robot.ets(start=l1, end=l2)is an ETS representing the kinematics from linkl1to linkl2.- Parameters:
start (:param) – start of path, defaults to
base_link:end (:param) – end of path, defaults to end-effector:
- Raises:
ValueError – a link does not belong to this ERobot
TypeError – a bad link argument
- Return type:
- Returns:
elementary transform sequence
Examples
>>> import roboticstoolbox as rtb >>> panda = rtb.models.ETS.Panda() >>> panda.ets() [ET.tz(param=0.333), ET.Rz(jindex=0), ET.Rx(param=-1.5707963267948966), ET.Rz(jindex=1), ET.Rx(param=1.5707963267948966), ET.tz(param=0.316), ET.Rz(jindex=2), ET.tx(param=0.0825), ET.Rx(param=1.5707963267948966), ET.Rz(jindex=3), ET.tx(param=-0.0825), ET.Rx(param=-1.5707963267948966), ET.tz(param=0.384), ET.Rz(jindex=4), ET.Rx(param=1.5707963267948966), ET.Rz(jindex=5), ET.tx(param=0.088), ET.Rx(param=1.5707963267948966), ET.tz(param=0.107), ET.Rz(jindex=6), ET.tz(param=0.10300000000000001), ET.Rz(param=-0.7853981633974483)]
- fdyn(T, q0, Q=None, Q_args={}, qd0=None, solver='RK45', solver_args={}, dt=None, progress=False)
Integrate forward dynamics
- Parameters:
T (
float) – integration timeq0 (
Union[ndarray,List[float],Tuple[float,...]]) – initial joint coordinatesQ (
Optional[Callable[[Any,float,ndarray,ndarray],ndarray]]) – a function that computes generalized joint force as a function of time and/or stateQ_args (
dict) – positional arguments passed totorqueqd0 (
Union[ndarray,List[float],Tuple[float,...],None]) – initial joint velocities, assumed zero if not givensolver (
str) – name of SciPy integrator to use, default'RK45'solver_args (
dict) – optional arguments passed to the SciPy integratordt (
float|None) – if given, interpolate the results to this timestepprogress (
bool) – show progress bar, default False
- Returns:
robot trajectory
- Return type:
namedtuple with fields
t,q,qd
tg = R.fdyn(T, q)integrates the dynamics of the robot with zero input torques over the time interval 0 toTand returns the trajectory as a namedtuple with elements:tthe time vector (M,)qthe joint coordinates (M,n)qdthe joint velocities (M,n)
tg = R.fdyn(T, q, torqfun)as above but the torque applied to the joints is given by the provided function:tau = function(robot, t, q, qd, **args)
where the inputs are:
the robot object
current time
current joint coordinates (n,)
current joint velocity (n,)
args, optional keyword arguments can be specified, these are passed in from the
targskeyword argument.
The function must return a Numpy array (n,) of joint forces/torques.
Examples
To apply zero joint torque to the robot without Coulomb friction:
>>> def myfunc(robot, t, q, qd): >>> return np.zeros((robot.n,))
>>> tg = robot.nofriction().fdyn(5, q0, myfunc)
>>> plt.figure() >>> plt.plot(tg.t, tg.q) >>> plt.show()
We could also use a lambda function:
>>> tg = robot.nofriction().fdyn( >>> 5, q0, lambda r, t, q, qd: np.zeros((r.n,)))
The robot is controlled by a PD controller. We first define a function to compute the control which has additional parameters for the setpoint and control gains (qstar, P, D):
>>> def myfunc(robot, t, q, qd, qstar, P, D): >>> return (qstar - q) * P + qd * D # P, D are (6,)
>>> tg = robot.fdyn(10, q0, myfunc, torque_args=(qstar, P, D)) )
Many integrators have variable step length which is problematic if we want to animate the result. If
dtis specified then the solver results are interpolated in time steps ofdt.Notes
- This function performs poorly with non-linear joint friction,
such as Coulomb friction. The R.nofriction() method can be used to set this friction to zero.
- If the function is not specified then zero force/torque is
applied to the manipulator joints.
Interpolation is performed using SciPy integrate.ode
The SciPy RK45 integrator is used by default
Interpolation is performed using SciPy interp1d
See also
DHRobot.accel(),DHRobot.nofriction(),DHRobot.rne()
- fellipse(q, opt='trans', unit='rad', centre='ee', add=True)
Create a force ellipsoid object for plotting with PyPlot.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – the joint configuration of the robotopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational force ellipsoidunit (
Literal['rad','deg']) –'rad'or'deg'centre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – centre of the ellipsoid —'ee'for the end-effector or a 3-vector[x, y, z]in the world frameadd (
bool) – ifTrue, add the ellipsoid to the active plot environment
- Returns:
an EllipsePlot object
- Return type:
EllipsePlot
robot.fellipse(q)creates a force ellipsoid for the robot at poseq. By default the ellipsoid is centered at the end-effector.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the end-effector. The option
centreallows its origin to be set to the specified 3-vector, or the string"ee"ensures it is drawn at the end-effector position.
- friction(qd)
Manipulator joint friction (Robot superclass)
- Parameters:
qd (
ndarray) – The joint velocities of the robot- Returns:
The joint friction forces/torques for the robot
- Return type:
robot.friction(qd)is a vector of joint friction forces/torques for the robot moving with joint velocitiesqd.The friction model includes:
Viscous friction which is a linear function of velocity.
Coulomb friction which is proportional to sign(qd).
\[\begin{split}\tau_j = G^2 B \dot{q}_j + |G_j| \left\{ \begin{array}{ll} \tau_{C,j}^+ & \mbox{if $\dot{q}_j > 0$} \\ \tau_{C,j}^- & \mbox{if $\dot{q}_j < 0$} \end{array} \right.\end{split}\]Notes
- The friction value should be added to the motor output torque to
determine the nett torque. It has a negative value when qd > 0.
- The returned friction value is referred to the output of the
gearbox.
- The friction parameters in the Link object are referred to the
motor.
Motor viscous friction is scaled up by \(G^2\).
Motor Coulomb friction is scaled up by \(G\).
- The appropriate Coulomb friction value to use in the
non-symmetric case depends on the sign of the joint velocity, not the motor velocity.
- Coulomb friction is zero for zero joint velocity, stiction is
not modeled.
- The absolute value of the gear ratio is used. Negative gear
ratios are tricky: the Puma560 robot has negative gear ratio for joints 1 and 3.
See also
Robot.nofriction(),Link.friction()
- get_path(end=None, start=None)
Find a path from start to end
- Parameters:
- Raises:
ValueError – link not known or ambiguous
- Return type:
- Returns:
the path from start to end
- Returns:
the number of joints in the path
- Returns:
the tool transform present after end
- property gravity: ndarray
Get/set default gravitational acceleration (Robot superclass)
robot.gravityis the default gravitational accelerationrobot.gravity = ...checks and sets default gravitationalacceleration
- Parameters:
gravity – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive)
- Returns:
gravitational acceleration
- gravload(q=None, gravity=None)
Compute gravity load
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – Joint coordinatesgravity (
Union[ndarray,List[float],Tuple[float,...],None]) – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the stored gravity values
- Returns:
The generalised joint force/torques due to gravity
- Return type:
ndarray(n,)
robot.gravload(q)calculates the joint gravity loading (n) for the robot in the joint configurationqand using the default gravitational acceleration specified in the DHRobot object.robot.gravload(q, gravity=g)as above except the gravitational acceleration is explicitly specified asg.Trajectory operation
If q is a matrix (nxm) each column is interpreted as a joint configuration vector, and the result is a matrix (nxm) each column being the corresponding joint torques.
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.gravload(puma.qz) array([ 0. , 37.4837, 0.2489, 0. , 0. , 0. ])
- gravload_x(q=None, gravity=None, pinv=False, representation='rpy/xyz', Ji=None)
Operational space gravity load
- Parameters:
gravity (ndarray(3,)) – gravitational acceleration in the world frame, downwards gravitational force is equivalent to robot base acceleration upwards (positive); if not supplied, uses the
gravityattribute of selfpinv – use pseudo inverse rather than inverse (Default value = False)
representation – the type of analytical Jacobian to use, default is
'rpy/xyz'Ji (ndarray(n,6)) – pre-computed inverse analytical Jacobian (optional)
- Returns:
The operational space gravity wrench
- Return type:
ndarray(6,)
robot.gravload_x(q)calculates the gravity wrench for the robot in the joint configurationqand using the default gravitational acceleration specified in the robot object.robot.gravload_x(q, gravity=g)as above except the gravitational acceleration is explicitly specified asg.\[\mathbf{G}_x = \mathbf{J}(q)^{-T} \mathbf{G}(q)\]The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If q is a matrix (nxm) each column is interpreted as a joint configuration vector, and the result is a matrix (nxm) each column being the corresponding joint torques.
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.gravload_x(puma.qn) array([-30.1218, 7.5797, 53.7378, -0. , -0.0283, -0. ])
Notes
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
- property hascollision
Robot has collision model
- Returns:
Robot has collision model
- Returns:
At least one link has associated collision model.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hascollision False
See also
- property hasdynamics
Robot has dynamic parameters
- Returns:
Robot has dynamic parameters
- Returns:
At least one link has associated dynamic parameters.
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hasdynamics True
- property hasgeometry
Robot has geometry model
At least one link has associated mesh to describe its shape.
- Returns:
Robot has geometry model
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.hasgeometry True
See also
- hierarchy()
Pretty print the robot link hierachy
- Return type:
- Returns:
Pretty print of the robot model
Examples
Makes a robot and prints the heirachy
>>> import roboticstoolbox as rtb >>> robot = rtb.models.URDF.Panda() >>> robot.hierarchy() panda_link0 panda_link1 panda_link2 panda_link3 panda_link4 panda_link5 panda_link6 panda_link7 panda_link8 panda_hand panda_leftfinger panda_rightfinger
- inertia(q)
Manipulator inertia matrix
inertia(q)is the symmetric joint inertia matrix (n,n) which relates joint torque to joint acceleration for the robot at joint configuration q.Trajectory operation
If
qis a matrix (m,n), each row is interpretted as a joint state vector, and the result is a 3d-matrix (nxnxk) where each plane corresponds to the inertia for the corresponding row of q.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.inertia(puma.qz) array([[ 3.9611, -0.1627, -0.1389, 0.0016, -0.0004, 0. ], [-0.1627, 4.4566, 0.3727, 0. , 0.0019, 0. ], [-0.1389, 0.3727, 0.9387, 0. , 0.0019, 0. ], [ 0.0016, 0. , 0. , 0.1924, 0. , 0. ], [-0.0004, 0.0019, 0.0019, 0. , 0.1713, 0. ], [ 0. , 0. , 0. , 0. , 0. , 0.1941]])
Notes
- The diagonal elements
M[j,j]are the inertia seen by joint actuator
j.
- The diagonal elements
- The off-diagonal elements
M[j,k]are coupling inertias that relate acceleration on joint
jto force/torque on jointk.
- The off-diagonal elements
- The diagonal terms include the motor inertia reflected through
the gear ratio.
See also
- inertia_x(q=None, pinv=False, representation='rpy/xyz', Ji=None)
Operational space inertia matrix
- Parameters:
- Returns:
The operational space inertia matrix
- Return type:
ndarray(6,6)
robot.inertia_x(q)is the operational space (Cartesian) inertia matrix which relates Cartesian force/torque to Cartesian acceleration at the joint configuration q.\[\mathbf{M}_x = \mathbf{J}(q)^{-T} \mathbf{M}(q) \mathbf{J}(q)^{-1}\]The transformation to operational space requires an analytical, rather than geometric, Jacobian.
analyticalcan be one of:Value
Rotational representation
'rpy/xyz'RPY angular rates in XYZ order (default)
'rpy/zyx'RPY angular rates in XYZ order
'eul'Euler angular rates in ZYZ order
'exp'exponential coordinate rates
Trajectory operation
If
qis a matrix (m,n), each row is interpretted as a joint state vector, and the result is a 3d-matrix (m,n,n) where each plane corresponds to the Cartesian inertia for the corresponding row ofq.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.inertia_x(puma.qn) array([[17.2954, -2.7542, -9.6233, 0. , 0.2795, 0. ], [-2.7542, 11.6452, 1.2459, 0.0001, -0.0703, 0.0001], [-9.6233, 1.2459, 13.3348, 0. , 0.2767, 0. ], [ 0. , 0.0001, 0. , 0.1941, 0. , 0.1941], [ 0.2795, -0.0703, 0.2767, 0. , 0.1713, 0. ], [ 0. , 0.0001, 0. , 0.1941, 0. , 0.1941]])
Notes
If the robot is not 6 DOF the
pinvoption is set True.pinv()is around 5x slower thaninv()
Warning
Assumes that the operational space has 6 DOF.
See also
- isprismatic(j)
Check if joint is prismatic
- Return type:
- Returns:
True if prismatic
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.prismaticjoints [False, False, False, False, False, False] >>> stanford = rtb.models.DH.Stanford() >>> stanford.isprismatic(1) False
See also
Link.isprismatic(),prismaticjoints()
- isrevolute(j)
Check if joint is revolute
- Return type:
- Returns:
True if revolute
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.revolutejoints [True, True, True, True, True, True] >>> stanford = rtb.models.DH.Stanford() >>> stanford.isrevolute(1) True
See also
Link.isrevolute(),revolutejoints()
- itorque(q, qdd)
Inertia torque
- Parameters:
- Returns:
The inertia torque vector
- Return type:
ndarray(n,)
itorque(q, qdd)is the inertia force/torque vector (n) at the specified joint configuration q (n) and acceleration qdd (n), andnis the number of robot joints. It is \(\mathbf{I}(q) \ddot{q}\).Trajectory operation
If
qandqddare matrices (m,n), each row is interpretted as a joint configuration, and the result is a matrix (m,n) where each row is the corresponding joint torques.Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.itorque(puma.qz, 0.5 * np.ones((6,))) array([1.8304, 2.3343, 0.5872, 0.0971, 0.0873, 0.0971])
Notes
- If the robot model contains non-zero motor inertia then this
will be included in the result.
See also
- jointdynamics(q, qd=None)
Transfer function of joint actuator
- Parameters:
- Returns:
transfer function denominators
- Return type:
list of 2-tuples
tf = jointdynamics(qd, q)calculates a vector of n continuous-time transfer functions that represent the transfer function 1/(Js+B) for each joint based on the dynamic parameters of the robot and the configuration q (n). n is the number of robot joints. The result is a list of tuples (J, B) for each joint.tf = jointdynamics(q, qd)as above but include the linearized effects of Coulomb friction when operating at joint velocity QD (1xN).
- linkcolormap(linkcolors='viridis')
Create a colormap for robot joints.
- Parameters:
linkcolors (
list[Any] |str) – list of colors or colormap name, defaults to"viridis"- Returns:
the color map
cm = robot.linkcolormap()is an n-element colormap that gives a unique color for every link. The RGBA colors for linkjarecm(j).cm = robot.linkcolormap(cmap)as above butcmapis the name of a valid matplotlib colormap. The default, example above, is theviridiscolormap.cm = robot.linkcolormap(list of colors)as above but a colormap is created from a list of n color names given as strings, tuples or hexstrings.
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> cm = robot.linkcolormap("inferno") >>> print(cm(range(6))) # cm(i) is 3rd color in colormap >>> cm = robot.linkcolormap( ... ['red', 'g', (0,0.5,0), '#0f8040', 'yellow', 'cyan']) >>> print(cm(range(6)))
Notes
Colormaps have 4-elements: red, green, blue, alpha (RGBA)
Names of supported colors and colormaps are defined in the matplotlib documentation.
- property links: list[LinkType]
Robot links
- Returns:
A list of link objects
Notes
It is probably more concise to index the robot object rather than the list of links, ie. the following are equivalent: -
robot.links[i]-robot[i]
- property manufacturer
Get/set robot manufacturer’s name
robot.manufactureris the robot manufacturer’s namerobot.manufacturer = ...checks and sets the manufacturer’s name
- Returns:
robot manufacturer’s name
- property n: int
Number of joints
- Returns:
Number of joints
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.n 6
See also
- property name: str
Get/set robot name
robot.nameis the robot namerobot.name = ...checks and sets the robot name
- Parameters:
name – the new robot name
- Returns:
the current robot name
- property nbranches: int
Number of branches
Number of branches in this robot. Computed as the number of links with zero children
- Returns:
number of branches in the robot’s kinematic tree
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.ETS.Panda() >>> robot.nbranches 1
- property nlinks
Number of links
The returned number is the total of both variable joints and static links
- Returns:
Number of links
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.nlinks 6
See also
- nofriction(coulomb=True, viscous=False)
Remove manipulator joint friction
- Parameters:
- Returns:
A copy of the robot with dynamic parameters perturbed
nofriction()copies the robot and returns a robot with the same link parameters except the Coulomb and/or viscous friction parameter are set to zero.See also
Robot.friction(),Link.nofriction()
- pay(W, q=None, J=None, frame=1)
Generalised joint force/torque due to a payload wrench
- Parameters:
W (
Union[ndarray,List[float],Tuple[float,...]]) – A wrench vector applied at the end effector, W = [Fx Fy Fz Mx My Mz]J (
ndarray|None) – The manipulator Jacobian (Optional, if not supplied will use the q value).frame (
int) – The frame in which to torques are expressed in when J is not supplied. 0 means base frame of the robot, 1 means end- effector frame
- Returns:
Joint forces/torques due to W
- Return type:
ndarray(n,)
tau = pay(W, J) Returns the generalised joint force/torques due to a payload wrench W applied to the end-effector. Where the manipulator Jacobian is J (6xn), and n is the number of robot joints.
tau = pay(W, q, frame) as above but the Jacobian is calculated at pose q in the frame given by frame which is 0 for base frame, 1 for end-effector frame.
Uses the formula tau = J’W, where W is a wrench vector applied at the end effector, W = [Fx Fy Fz Mx My Mz]’.
- Trajectory operation:
In the case q is nxm or J is 6xnxm then tau is nxm where each row is the generalised force/torque at the pose given by corresponding row of q.
Notes
- Wrench vector and Jacobian must be from the same reference
frame.
Tool transforms are taken into consideration when frame=1.
- Must have a constant wrench - no trajectory support for this
yet.
- paycap(w, tauR, frame=1, q=None)
Static payload capacity of a robot
- Parameters:
w (
ndarray) – The payload wrenchtauR (
ndarray) – Joint torque matrix minimum and maximumsframe (
int) – The frame in which to torques are expressed in when J is not supplied. ‘base’ means base frame of the robot, ‘ee’ means end-effector frameq (
Union[ndarray,List[float],Tuple[float,...],None]) – Joint coordinates
- Returns:
The maximum permissible payload wrench
- Return type:
ndarray(6,)
wmax, joint = paycap(q, w, f, tauR)returns the maximum permissible payload wrenchwmax(6) applied at the end-effector, and the index of the joint (zero indexed) which hits its force/torque limit at that wrench.q(n) is the manipulator pose,wthe payload wrench (6),fthe wrench reference frame and tauR (nx2) is a matrix of joint forces/torques (first col is maximum, second col minimum).Trajectory operation:
In the case q is nxm then wmax is Mx6 and J is Mx1 where the rows are the results at the pose given by corresponding row of q.
Notes
Wrench vector and Jacobian must be from the same reference frame
Tool transforms are taken into consideration for frame=1.
- payload(m, p=array([0., 0., 0.]))
Add a payload to the end-effector
- Parameters:
m (
float) – mass (kg)p (ndarray(3,)) – position in end-effector frame
payload(m, p) adds payload mass adds a payload with point mass m at position p in the end-effector coordinate frame.
payload(m) adds payload mass adds a payload with point mass m at in the end-effector coordinate frame.
payload(0) removes added payload.
- perturb(p=0.1)
Perturb robot parameters
- Parameters:
p – The percent (+/-) to be perturbed. Default 10%
- Returns:
A copy of the robot with dynamic parameters perturbed
rp = perturb(p) is a new robot object in which the dynamic parameters (link mass and inertia) have been perturbed. The perturbation is multiplicative so that values are multiplied by random numbers in the interval (1-p) to (1+p). The name string of the perturbed robot is prefixed by ‘P/’.
Useful for investigating the robustness of various model-based control schemes. For example to vary parameters in the range +/- 10 percent is: r2 = puma.perturb(0.1)
- plot(q, backend=None, block=False, dt=0.05, limits=None, vellipse=False, fellipse=False, fig=None, movie=None, loop=False, **kwargs)
Graphical display and animation
robot.plot(q, 'pyplot')displays a graphical view of a robot based on the kinematic model and the joint configurationq. This is a stick figure polyline which joins the origins of the link coordinate frames. The plot will autoscale with an aspect ratio of 1.If
q(m,n) representing a joint-space trajectory it will create an animation with a pause ofdtseconds between each frame.- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – The joint configuration of the robot.backend (
Optional[Literal['swift','pyplot','pyplot2']]) – The graphical backend to use, currently ‘swift’ and ‘pyplot’ are implemented. Defaults to ‘swift’ of aRobotand ‘pyplot` for aDHRobotblock (
bool) – Block operation of the code and keep the figure opendt (
float) – if q is a trajectory, this describes the delay in seconds between frameslimits (
Union[ndarray,List[float],Tuple[float,...],None]) – Custom view limits for the plot. If not supplied will autoscale, [x1, x2, y1, y2, z1, z2] (this option is for ‘pyplot’ only)vellipse (
bool) – (Plot Option) Plot the velocity ellipse at the end-effector (this option is for ‘pyplot’ only)fellipse (
bool) – (Plot Option) Plot the force ellipse at the end-effector (this option is for ‘pyplot’ only)fig (
str|None) – (Plot Option) The figure label to plot in (this option is for ‘pyplot’ only)movie (
str|None) – (Plot Option) The filename to save the movie to (this option is for ‘pyplot’ only)loop (
bool) – (Plot Option) Loop the movie (this option is for ‘pyplot’ only)jointaxes – (Plot Option) Plot an arrow indicating the axes in which the joint revolves around(revolute joint) or translates along (prosmatic joint) (this option is for ‘pyplot’ only)
eeframe – (Plot Option) Plot the end-effector coordinate frame at the location of the end-effector. Uses three arrows, red, green and blue to indicate the x, y, and z-axes. (this option is for ‘pyplot’ only)
shadow – (Plot Option) Plot a shadow of the robot in the x-y plane. (this option is for ‘pyplot’ only)
name – (Plot Option) Plot the name of the robot near its base (this option is for ‘pyplot’ only)
render_mode – (Plot Option) Rendering mode for matplotlib backends:
'window','notebook-widget', or'notebook-inline'. If omitted, an environment-appropriate mode is selected.inline_every_n – (Plot Option) In notebook-inline mode, push one rendered frame every N simulation steps. Larger N reduces output load.
inline_format – (Plot Option) In notebook-inline mode, frame format:
'svg'(default) or'png'.inline_dpi – (Plot Option) DPI for PNG inline frames only; ignored when
inline_format='svg'.
- Return type:
Connector- Returns:
A reference to the environment object which controls the figure
Notes
- By default this method will block until the figure is dismissed.
To avoid this set
block=False.
- For PyPlot, the polyline joins the origins of the link frames,
but for some Denavit-Hartenberg models those frames may not actually be on the robot, ie. the lines to not neccessarily represent the links of the robot.
See also
- plot_ellipse(ellipse, block=True, limits=None, jointaxes=True, eeframe=True, shadow=True, name=True)
Plot an ellipsoid.
- Parameters:
ellipse (
EllipsePlot) – the ellipsoid to plotblock (
bool) – block operation of the code and keep the figure openlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedjointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_ellipse(ellipsoid)displays the ellipsoid.
- plot_fellipse(q, block=True, fellipse=None, limits=None, opt='trans', centre='ee', jointaxes=True, eeframe=True, shadow=True, name=True)
Plot the force ellipsoid for a manipulator.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – the joint configuration of the robotblock (
bool) – block operation of the code and keep the figure openfellipse (
EllipsePlot|None) – a pre-built force ellipsoid to plotlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational force ellipsoidcentre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – coordinates to plot the ellipse —[x, y, z]or"ee"jointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Raises:
ValueError – if neither
qnorfellipseis supplied- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_fellipse(q)displays the force ellipsoid for the robot at poseq. The plot will autoscale with an aspect ratio of 1.robot.plot_fellipse(vellipse=ell)uses a pre-built ellipse object.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the origin. Use
centreto specify a 3-vector, or"ee"to draw at the end-effector.
- plot_vellipse(q, block=True, vellipse=None, limits=None, opt='trans', centre='ee', jointaxes=True, eeframe=True, shadow=True, name=True)
Plot the velocity ellipsoid for a manipulator.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – the joint configuration of the robotblock (
bool) – block operation of the code and keep the figure openvellipse (
EllipsePlot|None) – a pre-built velocity ellipsoid to plotlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – custom view limits[x1, x2, y1, y2, z1, z2]; autoscales if not suppliedopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational velocity ellipsoidcentre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – coordinates to plot the ellipse —[x, y, z]or"ee"jointaxes (
bool) – plot an arrow indicating the joint axiseeframe (
bool) – plot the end-effector coordinate frameshadow (
bool) – plot a shadow of the robot in the x-y planename (
bool) – plot the name of the robot near its base
- Raises:
ValueError – if neither
qnorvellipseis supplied- Returns:
a reference to the PyPlot object controlling the matplotlib figure
- Return type:
robot.plot_vellipse(q)displays the velocity ellipsoid for the robot at poseq. The plot will autoscale with an aspect ratio of 1.robot.plot_vellipse(vellipse=ell)uses a pre-built ellipse object.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the origin. Use
centreto specify a 3-vector, or"ee"to draw at the end-effector.
- property prismaticjoints: list[bool]
Revolute joints as bool array
- Returns:
array of joint type, True if prismatic
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.prismaticjoints [False, False, False, False, False, False] >>> stanford = rtb.models.DH.Stanford() >>> stanford.prismaticjoints [False, False, True, False, False, False]
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
See also
Link.isprismatic(),revolutejoints()
- property q: ndarray
Get/set robot joint configuration
robot.qis the robot joint configurationrobot.q = ...checks and sets the joint configuration
- Parameters:
q – the new robot joint configuration
- Returns:
robot joint configuration
- property qd: ndarray
Get/set robot joint velocity
robot.qdis the robot joint velocityrobot.qd = ...checks and sets the joint velocity
- Returns:
robot joint velocity
- property qdd: ndarray
Get/set robot joint acceleration
robot.qddis the robot joint accelerationrobot.qdd = ...checks and sets the robot joint acceleration
- Returns:
robot joint acceleration
- property qlim: ndarray
Joint limits
Limits are extracted from the link objects. If joints limits are not set for:
a revolute joint [-𝜋. 𝜋] is returned
a prismatic joint an exception is raised
- Parameters:
qlim – An array of joints limits (2, n)
- Raises:
ValueError – unset limits for a prismatic joint
- Returns:
Array of joint limit values
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot.qlim array([[-2.7925, -1.9199, -2.3562, -4.6426, -1.7453, -4.6426], [ 2.7925, 1.9199, 2.3562, 4.6426, 1.7453, 4.6426]])
- random_q()
Return a random joint configuration
The value for each joint is uniform randomly distributed between the limits set for the robot.
Notes
The joint limit for all joints must be set.
- Returns:
Random joint configuration :rtype: ndarray(n)
See also
Robot.qlim(),Link.qlim()
- property revolutejoints: list[bool]
Revolute joints as bool array
- Returns:
array of joint type, True if revolute
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.revolutejoints [True, True, True, True, True, True] >>> stanford = rtb.models.DH.Stanford() >>> stanford.revolutejoints [True, True, False, True, True, True]
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
See also
Link.isrevolute(),prismaticjoints()
- segments()
Segments of branched robot
For a single-chain robot with structure:
L1 - L2 - L3
the return is
[[None, L1, L2, L3]]For a robot with structure:
L1 - L2 +- L3 - L4 +- L5 - L6
the return is
[[None, L1, L2], [L2, L3, L4], [L2, L5, L6]]Notes
the length of the list is the number of segments in the robot
- the first segment always starts with
Nonewhich represents the base transform (since there is no base link)
- the first segment always starts with
- the last link of one segment is also the first link of subsequent
segments
- showgraph(display_graph=True, **kwargs)
Display a link transform graph in browser
robot.showgraph()displays a graph of the robot’s link frames and the ETS between them. It uses GraphViz dot.- The nodes are:
Base is shown as a grey square. This is the world frame origin, but can be changed using the
baseattribute of the robot.Link frames are indicated by circles
ETS transforms are indicated by rounded boxes
- The edges are:
an arrow if
jtypeis False or the joint is fixedan arrow with a round head if
jtypeis True and the joint is revolutean arrow with a box head if
jtypeis True and the joint is prismatic
Edge labels or nodes in blue have a fixed transformation to the preceding link.
- Parameters:
display_graph (
bool) – Open the graph in a browser if True. Otherwise will return the file pathetsbox – Put the link ETS in a box, otherwise an edge label
jtype – Arrowhead to node indicates revolute or prismatic type
static – Show static joints in blue and bold
- Return type:
Examples
>>> import roboticstoolbox as rtb >>> panda = rtb.models.URDF.Panda() >>> panda.showgraph()
See also
- property structure: str
Return the joint structure string
A string with one letter per joint:
Rfor a revolute joint, andPfor a prismatic joint.- Returns:
joint configuration string
Examples
>>> import roboticstoolbox as rtb >>> puma = rtb.models.DH.Puma560() >>> puma.structure 'RRRRRR' >>> stanford = rtb.models.DH.Stanford() >>> stanford.structure 'RRPRRR'
Notes
Fixed joints, that maintain a constant link relative pose, are not included.
len(self.structure) == self.n.
- teach(q, block=True, limits=None, vellipse=False, fellipse=False, backend=None)
Graphical teach pendant
robot.teach(q)creates a matplotlib plot which allows the user to “drive” a graphical robot using a graphical slider panel. The robot’s inital joint configuration isq. The plot will autoscale with an aspect ratio of 1.robot.teach()as above except the robot’s stored value ofqis used.- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...],None]) – The joint configuration of the robot (Optional, if not supplied will use the stored q values).block (
bool) – Block operation of the code and keep the figure openlimits (
Union[ndarray,List[float],Tuple[float,...],None]) – Custom view limits for the plot. If not supplied will autoscale, [x1, x2, y1, y2, z1, z2]vellipse (
bool) – (Plot Option) Plot the velocity ellipse at the end-effector (this option is for ‘pyplot’ only)fellipse (
bool) – (Plot Option) Plot the force ellipse at the end-effector (this option is for ‘pyplot’ only)
- Return type:
Connector- Returns:
A reference to the PyPlot object which controls the matplotlib figure
Notes
Program execution is blocked until the teach window is dismissed. If
block=Falsethe method is non-blocking but you need to poll the window manager to ensure that the window remains responsive.The slider limits are derived from the joint limit properties. If not set then:
For revolute joints they are assumed to be [-pi, +pi]
For prismatic joint they are assumed unknown and an error occurs.
- todegrees(q)
Convert joint angles to degrees
- Parameters:
q – The joint configuration of the robot
- Return type:
- Returns:
a vector of joint coordinates in degrees and metres
- Returns:
robot.todegrees(q)converts joint coordinatesqto degrees- Returns:
taking into account whether elements of
qcorrespond to revolute- Returns:
or prismatic joints, ie. prismatic joint values are not converted.
- Returns:
If
qis a matrix, with one column per joint, the conversion is- Returns:
performed columnwise.
Examples
>>> import roboticstoolbox as rtb >>> from math import pi >>> stanford = rtb.models.DH.Stanford() >>> stanford.todegrees([pi/4, pi/8, 2, -pi/4, pi/6, pi/3]) array([ 45. , 22.5, 2. , -45. , 30. , 60. ])
- property tool: SE3
Get/set robot tool transform
robot.toolis the robot tool transform as an SE3 objectrobot._toolis the robot tool transform as a numpy arrayrobot.tool = ...checks and sets the robot tool transform
- Parameters:
tool – the new robot tool transform (as an SE(3))
- Returns:
robot tool transform
- toradians(q)
Convert joint angles to radians
robot.toradians(q)converts joint coordinatesqto radians taking into account whether elements ofqcorrespond to revolute or prismatic joints, ie. prismatic joint values are not converted.If
qis a matrix, with one column per joint, the conversion is performed columnwise.- Parameters:
q – The joint configuration of the robot
- Return type:
- Returns:
a vector of joint coordinates in radians and metres
Examples
>>> import roboticstoolbox as rtb >>> stanford = rtb.models.DH.Stanford() >>> stanford.toradians([10, 20, 2, 30, 40, 50]) array([0.1745, 0.3491, 2. , 0.5236, 0.6981, 0.8727])
- vellipse(q, opt='trans', unit='rad', centre='ee', scale=0.1, add=True)
Create a velocity ellipsoid object for plotting with PyPlot.
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – the joint configuration of the robotopt (
Literal['trans','rot']) –'trans'or'rot'— plot the translational or rotational velocity ellipsoidunit (
Literal['rad','deg']) –'rad'or'deg'centre (
Union[Literal['ee'],ndarray,List[float],Tuple[float,...]]) – centre of the ellipsoid —'ee'for the end-effector or a 3-vector[x, y, z]in the world framescale (
float) – scale factor for the ellipsoidadd (
bool) – ifTrue, add the ellipsoid to the active plot environment
- Returns:
an EllipsePlot object
- Return type:
EllipsePlot
robot.vellipse(q)creates a velocity ellipsoid for the robot at poseq. By default the ellipsoid is centered at the end-effector.Notes
By default the ellipsoid related to translational motion is drawn. Use
opt='rot'to draw the rotational velocity ellipsoid.By default the ellipsoid is drawn at the end-effector. The option
centreallows its origin to be set to the specified 3-vector, or the string"ee"ensures it is drawn at the end-effector position.
- property base: SE2
Get/set robot base transform (Robot superclass)
- Returns:
robot tool transform
robot.baseis the robot base transformrobot.base = ...checks and sets the robot base transform
Notes
- The private attribute
_basewill be None in the case of no base transform, but this property will return
SE3()which is an identity matrix.
- The private attribute
- property reach: float
Reach of the robot
- Returns:
Maximum reach of the robot
- Return type:
A conservative estimate of the reach of the robot. It is computed as the sum of the translational ETs that define the link transform.
Computed on the first access. If kinematic parameters subsequently change this will not be reflected.
Notes
Probably an overestimate of reach
Used by numerical inverse kinematics to scale translational error.
For a prismatic joint, uses
qlimif it is set
- fkine_all(q)[source]
Compute the pose of every link frame
- Parameters:
q (
Union[ndarray,List[float],Tuple[float,...]]) – The joint configuration- Return type:
- Returns:
Pose of all links
T = robot.fkine_all(q)is an SE3 instance withrobot.nlinks + 1values:T[0]is the base transformT[i]is the pose of link whosenumberisi
References
J. Haviland, and P. Corke. “Manipulator Differential Kinematics Part I: Kinematics, Velocity, and Applications.” arXiv preprint arXiv:2207.01796 (2022).
Kinematic cache
Link
The ERobot is defined by a tree of ELink subclass objects.

- class roboticstoolbox.robot.Link.BaseLink(ets=[], name=None, parent=None, joint_name=None, m=None, r=None, I=None, Jm=None, B=None, Tc=None, G=None, qlim=None, qdlim=None, tlim=None, geometry=[], collision=[], **kwargs)[source]
Bases:
SceneNode,ABCAn abstract link superclass for all link types.
- Parameters:
ets (
ETS|ETS2|ET|ET2) – kinematic - The elementary transforms which make up the linkname – name of the link
parent (
Union[Self,str,None]) – a reference to the parent link in the kinematic chainr (
Union[ndarray,List[float],Tuple[float,...],None]) – dynamic - position of COM with respect to link frameI (
Union[ndarray,List[float],Tuple[float,...],None]) – dynamic - inertia of link with respect to COMTc (
Union[ndarray,List[float],Tuple[float,...],None]) – dynamic - motor Coulomb friction [Tc⁺, Tc⁻]qlim (
Union[ndarray,List[float],Tuple[float,...],None]) – joint variable limits [min, max]geometry (
list[Shape]) – the visual geometry which represents the link. This is used to display the link in Swiftcollision (
list[Shape]) – the collision geometry which represents the link in collision checkers
It holds metadata related to:
a robot link, such as rigid-body inertial parameters defined in the link frame, and link name
a robot joint, that connects this link to its parent, such as joint limits, direction of motion, motor and transmission parameters.
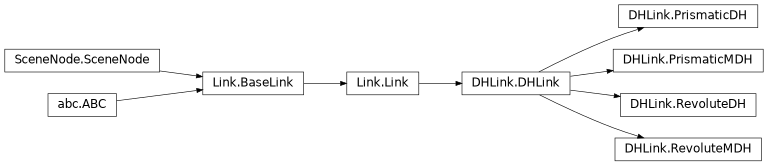
Notes
- For a more sophisticated actuator model use the
actuator attribute which is not initialized or used by this Toolbox.
- For a more sophisticated actuator model use the
There is no ability to name a joint as supported by URDF
- property Ts: ndarray | None
Constant part of link ETS
- Returns:
constant part of link transform
- Return type:
ndarray(4,4) or None
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the constant part. If no constant part is given, this returns an identity matrix.
Examples
>>> from roboticstoolbox import Link, ET >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> link.Ts array([[ 1. , 0. , 0. , 0. ], [ 0. , 0. , -1. , 0. ], [ 0. , 1. , 0. , 0.333], [ 0. , 0. , 0. , 1. ]]) >>> link = Link( ET.Rz() ) >>> link.Ts
- property ets: ETS
Get/set link ets
link.etsis the link etslink.ets = ...checks and sets the link ets
- Parameters:
ets – the new link ets
- Returns:
the current link ets
- __str__()[source]
Pretty prints the ETS Model of the link
- Return type:
- Returns:
pretty print of the robot link
Will output angles in degrees
- copy()[source]
Copy of link object
- Return type:
Self- Returns:
copy of link object
link.copy()is a new Link subclass instance with a copy of all the parameters.
- property v: BaseET | None
Variable part of link ETS
- Returns:
joint variable transform
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the latter.
Examples
>>> from roboticstoolbox import Link, ET, ETS >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> print(link.v) Rz(q0)
- property name: str
Get/set link name
link.nameis the link namelink.name = ...checks and sets the link name
- Returns:
link name
- property robot: BaseRobot | None
Get forward reference to the robot which owns this link
link.robotis the robot referencelink.robot = ...checks and sets the robot reference
- Returns:
The robot object
- property qlim: ndarray | None
Get/set joint limits
link.qlimis the joint limitslink.qlim = ...checks and sets the joint limits
- Returns:
joint limits
- Return type:
ndarray(2,) or None
Notes
The limits are not widely enforced within the toolbox.
If no joint limits are specified the value is
None
- Seealso:
- property qdlim: float | None
Get/set joint velocity limits
link.qdlimis the joint velocity limitslink.qdlim = ...checks and sets the joint velocity limits
- Returns:
joint velocity limits
Notes
The limits are not widely enforced within the toolbox.
If no joint velocity limits are specified the value is
None
- Seealso:
- property tlim: float | None
Get/set joint torque limits
link.tlimis the joint torque/force limitslink.tlim = ...checks and sets the joint torque limits
- Returns:
joint torque limits
Notes
The limits are not widely enforced within the toolbox.
If no joint torque limits are specified the value is
None
- Seealso:
- property hasdynamics: bool
Link has dynamic parameters (Link superclass)
- Returns:
Link has dynamic parameters
Link has some assigned (non-default) dynamic parameters. These could have been assigned:
at constructor time, eg.
m=1.2by invoking a setter method, eg.
link.m = 1.2
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot[1].hasdynamics True
- property isflip: bool
Get/set joint flip
- Returns:
joint flip
link.flipis the joint flip statuslink.flip = ...checks and sets the joint flip status
Joint flip defines the direction of motion of the joint.
flip = Falseis conventional motion direction:revolute motion is a positive rotation about the z-axis
prismatic motion is a positive translation along the z-axis
flip = Trueis the opposite motion direction:revolute motion is a negative rotation about the z-axis
prismatic motion is a negative translation along the z-axis
- property m: float
Get/set link mass
link.mis the link masslink.m = ...checks and sets the link mass
- Returns:
link mass
- property r: ndarray
Get/set link centre of mass
- Returns:
link centre of mass
- Return type:
ndarray(3,)
The link centre of mass is a 3-vector defined with respect to the link frame.
link.ris the link centre of masslink.r = ...checks and sets the link centre of mass
- property I: ndarray
Get/set link inertia
- Returns:
link inertia
- Return type:
ndarray(3,3)
Link inertia is a symmetric 3x3 matrix describing the inertia with respect to a frame with its origin at the centre of mass, and with axes parallel to those of the link frame.
link.Iis the link inertialink.I = ...checks and sets the link inertia
The inertia matrix is
\(\begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\I_{xz} & I_{yz} & I_{zz} \end{bmatrix}\)
and can be specified as either:
a 3 ⨉ 3 symmetric matrix
a 3-vector \((I_{xx}, I_{yy}, I_{zz})\)
a 6-vector \((I_{xx}, I_{yy}, I_{zz}, I_{xy}, I_{yz}, I_{xz})\)
Notes
Referred to the link side of the gearbox.
- property Jm: float
Get/set motor inertia
link.Jmis the motor inertialink.Jm = ...checks and sets the motor inertia
- Returns:
motor inertia
Notes
Referred to the motor side of the gearbox.
- property B: float
Get/set motor viscous friction
link.Bis the motor viscous frictionlink.B = ...checks and sets the motor viscous friction
- Returns:
motor viscous friction
Notes
Referred to the motor side of the gearbox.
Viscous friction is the same for positive and negative motion.
- property Tc: ndarray
Get/set motor Coulomb friction
- Returns:
motor Coulomb friction
- Return type:
ndarray(2,)
link.Tcis the motor Coulomb frictionlink.Tc = ...checks and sets the motor Coulomb friction. If a scalar is given the value is set to [T, -T], if a 2-vector it is assumed to be in the order [Tc⁺, Tc⁻]
Coulomb friction is a non-linear friction effect defined by two parameters such that
\[\begin{split}\tau = \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
Referred to the motor side of the gearbox.
- \(\tau_C^+\) must be \(> 0\), and \(\tau_C^-\) must
be \(< 0\).
- property G: float
Get/set gear ratio
link.Gis the transmission gear ratiolink.G = ...checks and sets the gear ratio
- Returns:
gear ratio
Notes
The ratio of motor motion : link motion
The gear ratio can be negative, see also the
flipattribute.
- Seealso:
flip()
- property collision: SceneGroup
Get/set joint collision geometry
The collision geometries are what is used to check for collisions.
link.collisionis the list of the collision geometries whichrepresent the collidable shape of the link. :return: the collision geometries :rtype: list of Shape
link.collision = ...checks and sets the collision geometrylink.collision.append(...)add collision geometry
- property geometry: SceneGroup
Get/set joint visual geometry
link.geometryis the list of the visual geometries whichrepresent the shape of the link :return: the visual geometries :rtype: list of Shape
link.geometry = ...checks and sets the geometrylink.geometry.append(...)add geometry
- property isjoint: bool
Test if link has joint
- Returns:
test if link has a joint
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the whether the Link contains the variable transform.
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[1].isjoint # link with joint True >>> robot[8].isjoint # static link False
- property jindex: int | None
Get/set joint index
link.jindexis the joint indexlink.jindex = ...checks and sets the joint index
- Returns:
joint index
For a serial-link manipulator the joints are numbered starting at zero and increasing sequentially toward the end-effector. For branched mechanisms this is not so straightforward. The link’s
jindexproperty specifies the index of its joint variable within a vector of joint coordinates.Notes
jindexvalues must be a sequence of integers startingat zero.
- attach(object)
- attach_to(object)
- property parent: Self | None
Parent link
- Returns:
Link’s parent
This is a reference to the links parent in the kinematic chain
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[0].parent # base link has no parent >>> robot[1].parent # second link's parent Link(name = "panda_link0")
- property children: list[Link] | None
List of child links
- Returns:
child links
The list will be empty for a end-effector link
- property nchildren: int
Number of child links
- Returns:
number of child links
Will be zero for an end-effector link
- closest_point(shape, inf_dist=1.0, skip=False)[source]
Finds the closest point to a shape
- Parameters:
- Return type:
- Returns:
(d, p1, p2) where d is the distance between the shapes, p1 is the point in the world frame on the link [x, y, z], and p2 is the point in the world frame on the shape [x, y, z].
closest_point(shape, inf_dist) returns the minimum euclidean distance between this link and shape, provided it is less than inf_dist. It will also return the points on self and shape in the world frame which connect the line of length distance between the shapes. If the distance is negative then the shapes are collided.
- iscollided(shape, skip=False)[source]
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Return type:
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- collided(shape, skip=False)[source]
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- dyn(indent=0)[source]
Inertial properties of link as a string
- Parameters:
indent – indent each line by this many spaces
link.dyn()is a string representation the inertial properties of the link object in a multi-line format. The properties shown are mass, centre of mass, inertia, friction, gear ratio and motor properties.Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> print(robot.links[2]) # kinematic parameters RevoluteDH: θ=q, d=0.15005, a=0.0203, ⍺=-1.5707963267948966 >>> print(robot.links[2].dyn()) # dynamic parameters m = 4.8 r = -0.02 -0.014 0.07 | 0.066 0 0 | I = | 0 0.086 0 | | 0 0 0.013 | Jm = 0.0002 B = 0.0014 Tc = 0.13(+) -0.1(-) G = -54 qlim = -2.4 to 2.4
- Seealso:
dyntable()
- islimit(q)[source]
Checks if joint exceeds limit
- Parameters:
q (
float) – joint coordinate- Returns:
True if joint is exceeded
link.islimit(q)is True ifqexceeds the joint limits defined bylink.Notes
If no limits are set always return False.
- Seealso:
- nofriction(coulomb=True, viscous=False)[source]
Clone link without friction
- Parameters:
link.nofriction()is a copy of the link instance with the same parameters except, the Coulomb and/or viscous friction parameters are set to zero.Notes
- For simulation it can be useful to remove Couloumb friction
which can cause problems for numerical integration.
- friction(qd, coulomb=True)[source]
Compute joint friction
- Parameters:
- Returns:
the friction force/torque
friction(qd)is the joint friction force/torque for joint velocityqd. The friction model includes:Viscous friction which is a linear function of velocity.
Coulomb friction which is proportional to sign(qd).
\[\begin{split}\tau = G^2 B \dot{q} + |G| \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
- The friction value should be added to the motor output torque to
determine the nett torque. It has a negative value when qd > 0.
- The returned friction value is referred to the output of the
gearbox.
- The friction parameters in the Link object are referred to the
motor.
Motor viscous friction is scaled up by \(G^2\).
Motor Coulomb friction is scaled up by math:
G.- The appropriate Coulomb friction value to use in the
non-symmetric case depends on the sign of the joint velocity, not the motor velocity.
- Coulomb friction is zero for zero joint velocity, stiction is
not modeled.
- The absolute value of the gear ratio is used. Negative gear
ratios are tricky: the Puma560 robot has negative gear ratio for joints 1 and 3.
- class roboticstoolbox.robot.Link.Link(ets=[], jindex=None, **kwargs)[source]
Bases:
BaseLinkETS link class
- Parameters:
ets (
ETS|ET) – kinematic - The elementary transforms which make up the linkname – name of the link
parent – a reference to the parent link in the kinematic chain
joint_name – the name of the joint variable
m – dynamic - link mass
r – dynamic - position of COM with respect to link frame
I – dynamic - inertia of link with respect to COM
Jm – dynamic - motor inertia
B – dynamic - motor viscous friction
Tc – dynamic - motor Coulomb friction [Tc⁺, Tc⁻]
G – dynamic - gear ratio
qlim – joint variable limits [min, max]
geometry – the visual geometry which represents the link. This is used to display the link in Swift
collision – the collision geometry which represents the link in collision checkers
The Link object holds all information related to a robot link and can form a serial-connected chain or a rigid-body tree. It inherits from the Link class which provides common functionality such as joint and link such as kinematics parameters, The transform to the next link is given as an ETS with the joint variable, if present, as the last term. This is preprocessed and the object stores:
Tsthe constant part as a NumPy array, or Noneva pointer to an ETS object representing the joint variable, or None
- Seealso:
Link2,DHLink
- property B: float
Get/set motor viscous friction
link.Bis the motor viscous frictionlink.B = ...checks and sets the motor viscous friction
- Returns:
motor viscous friction
Notes
Referred to the motor side of the gearbox.
Viscous friction is the same for positive and negative motion.
- property G: float
Get/set gear ratio
link.Gis the transmission gear ratiolink.G = ...checks and sets the gear ratio
- Returns:
gear ratio
Notes
The ratio of motor motion : link motion
The gear ratio can be negative, see also the
flipattribute.
- Seealso:
flip()
- property I: ndarray
Get/set link inertia
- Returns:
link inertia
- Return type:
ndarray(3,3)
Link inertia is a symmetric 3x3 matrix describing the inertia with respect to a frame with its origin at the centre of mass, and with axes parallel to those of the link frame.
link.Iis the link inertialink.I = ...checks and sets the link inertia
The inertia matrix is
\(\begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\I_{xz} & I_{yz} & I_{zz} \end{bmatrix}\)
and can be specified as either:
a 3 ⨉ 3 symmetric matrix
a 3-vector \((I_{xx}, I_{yy}, I_{zz})\)
a 6-vector \((I_{xx}, I_{yy}, I_{zz}, I_{xy}, I_{yz}, I_{xz})\)
Notes
Referred to the link side of the gearbox.
- property Jm: float
Get/set motor inertia
link.Jmis the motor inertialink.Jm = ...checks and sets the motor inertia
- Returns:
motor inertia
Notes
Referred to the motor side of the gearbox.
- property Tc: ndarray
Get/set motor Coulomb friction
- Returns:
motor Coulomb friction
- Return type:
ndarray(2,)
link.Tcis the motor Coulomb frictionlink.Tc = ...checks and sets the motor Coulomb friction. If a scalar is given the value is set to [T, -T], if a 2-vector it is assumed to be in the order [Tc⁺, Tc⁻]
Coulomb friction is a non-linear friction effect defined by two parameters such that
\[\begin{split}\tau = \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
Referred to the motor side of the gearbox.
- \(\tau_C^+\) must be \(> 0\), and \(\tau_C^-\) must
be \(< 0\).
- property Ts: ndarray | None
Constant part of link ETS
- Returns:
constant part of link transform
- Return type:
ndarray(4,4) or None
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the constant part. If no constant part is given, this returns an identity matrix.
Examples
>>> from roboticstoolbox import Link, ET >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> link.Ts array([[ 1. , 0. , 0. , 0. ], [ 0. , 0. , -1. , 0. ], [ 0. , 1. , 0. , 0.333], [ 0. , 0. , 0. , 1. ]]) >>> link = Link( ET.Rz() ) >>> link.Ts
- __str__()
Pretty prints the ETS Model of the link
- Return type:
- Returns:
pretty print of the robot link
Will output angles in degrees
- attach(object)
- attach_to(object)
- property children: list[Link] | None
List of child links
- Returns:
child links
The list will be empty for a end-effector link
- closest_point(shape, inf_dist=1.0, skip=False)
Finds the closest point to a shape
- Parameters:
- Return type:
- Returns:
(d, p1, p2) where d is the distance between the shapes, p1 is the point in the world frame on the link [x, y, z], and p2 is the point in the world frame on the shape [x, y, z].
closest_point(shape, inf_dist) returns the minimum euclidean distance between this link and shape, provided it is less than inf_dist. It will also return the points on self and shape in the world frame which connect the line of length distance between the shapes. If the distance is negative then the shapes are collided.
- collided(shape, skip=False)
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- property collision: SceneGroup
Get/set joint collision geometry
The collision geometries are what is used to check for collisions.
link.collisionis the list of the collision geometries whichrepresent the collidable shape of the link. :return: the collision geometries :rtype: list of Shape
link.collision = ...checks and sets the collision geometrylink.collision.append(...)add collision geometry
- copy()
Copy of link object
- Return type:
Self- Returns:
copy of link object
link.copy()is a new Link subclass instance with a copy of all the parameters.
- dyn(indent=0)
Inertial properties of link as a string
- Parameters:
indent – indent each line by this many spaces
link.dyn()is a string representation the inertial properties of the link object in a multi-line format. The properties shown are mass, centre of mass, inertia, friction, gear ratio and motor properties.Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> print(robot.links[2]) # kinematic parameters RevoluteDH: θ=q, d=0.15005, a=0.0203, ⍺=-1.5707963267948966 >>> print(robot.links[2].dyn()) # dynamic parameters m = 4.8 r = -0.02 -0.014 0.07 | 0.066 0 0 | I = | 0 0.086 0 | | 0 0 0.013 | Jm = 0.0002 B = 0.0014 Tc = 0.13(+) -0.1(-) G = -54 qlim = -2.4 to 2.4
- Seealso:
dyntable()
- property ets: ETS
Get/set link ets
link.etsis the link etslink.ets = ...checks and sets the link ets
- Parameters:
ets – the new link ets
- Returns:
the current link ets
- friction(qd, coulomb=True)
Compute joint friction
- Parameters:
- Returns:
the friction force/torque
friction(qd)is the joint friction force/torque for joint velocityqd. The friction model includes:Viscous friction which is a linear function of velocity.
Coulomb friction which is proportional to sign(qd).
\[\begin{split}\tau = G^2 B \dot{q} + |G| \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
- The friction value should be added to the motor output torque to
determine the nett torque. It has a negative value when qd > 0.
- The returned friction value is referred to the output of the
gearbox.
- The friction parameters in the Link object are referred to the
motor.
Motor viscous friction is scaled up by \(G^2\).
Motor Coulomb friction is scaled up by math:
G.- The appropriate Coulomb friction value to use in the
non-symmetric case depends on the sign of the joint velocity, not the motor velocity.
- Coulomb friction is zero for zero joint velocity, stiction is
not modeled.
- The absolute value of the gear ratio is used. Negative gear
ratios are tricky: the Puma560 robot has negative gear ratio for joints 1 and 3.
- property geometry: SceneGroup
Get/set joint visual geometry
link.geometryis the list of the visual geometries whichrepresent the shape of the link :return: the visual geometries :rtype: list of Shape
link.geometry = ...checks and sets the geometrylink.geometry.append(...)add geometry
- property hasdynamics: bool
Link has dynamic parameters (Link superclass)
- Returns:
Link has dynamic parameters
Link has some assigned (non-default) dynamic parameters. These could have been assigned:
at constructor time, eg.
m=1.2by invoking a setter method, eg.
link.m = 1.2
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot[1].hasdynamics True
- iscollided(shape, skip=False)
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Return type:
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- property isflip: bool
Get/set joint flip
- Returns:
joint flip
link.flipis the joint flip statuslink.flip = ...checks and sets the joint flip status
Joint flip defines the direction of motion of the joint.
flip = Falseis conventional motion direction:revolute motion is a positive rotation about the z-axis
prismatic motion is a positive translation along the z-axis
flip = Trueis the opposite motion direction:revolute motion is a negative rotation about the z-axis
prismatic motion is a negative translation along the z-axis
- property isjoint: bool
Test if link has joint
- Returns:
test if link has a joint
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the whether the Link contains the variable transform.
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[1].isjoint # link with joint True >>> robot[8].isjoint # static link False
- islimit(q)
Checks if joint exceeds limit
- Parameters:
q (
float) – joint coordinate- Returns:
True if joint is exceeded
link.islimit(q)is True ifqexceeds the joint limits defined bylink.Notes
If no limits are set always return False.
- Seealso:
- property jindex: int | None
Get/set joint index
link.jindexis the joint indexlink.jindex = ...checks and sets the joint index
- Returns:
joint index
For a serial-link manipulator the joints are numbered starting at zero and increasing sequentially toward the end-effector. For branched mechanisms this is not so straightforward. The link’s
jindexproperty specifies the index of its joint variable within a vector of joint coordinates.Notes
jindexvalues must be a sequence of integers startingat zero.
- property m: float
Get/set link mass
link.mis the link masslink.m = ...checks and sets the link mass
- Returns:
link mass
- property name: str
Get/set link name
link.nameis the link namelink.name = ...checks and sets the link name
- Returns:
link name
- property nchildren: int
Number of child links
- Returns:
number of child links
Will be zero for an end-effector link
- nofriction(coulomb=True, viscous=False)
Clone link without friction
- Parameters:
link.nofriction()is a copy of the link instance with the same parameters except, the Coulomb and/or viscous friction parameters are set to zero.Notes
- For simulation it can be useful to remove Couloumb friction
which can cause problems for numerical integration.
- property parent: Self | None
Parent link
- Returns:
Link’s parent
This is a reference to the links parent in the kinematic chain
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[0].parent # base link has no parent >>> robot[1].parent # second link's parent Link(name = "panda_link0")
- property qdlim: float | None
Get/set joint velocity limits
link.qdlimis the joint velocity limitslink.qdlim = ...checks and sets the joint velocity limits
- Returns:
joint velocity limits
Notes
The limits are not widely enforced within the toolbox.
If no joint velocity limits are specified the value is
None
- Seealso:
- property qlim: ndarray | None
Get/set joint limits
link.qlimis the joint limitslink.qlim = ...checks and sets the joint limits
- Returns:
joint limits
- Return type:
ndarray(2,) or None
Notes
The limits are not widely enforced within the toolbox.
If no joint limits are specified the value is
None
- Seealso:
- property r: ndarray
Get/set link centre of mass
- Returns:
link centre of mass
- Return type:
ndarray(3,)
The link centre of mass is a 3-vector defined with respect to the link frame.
link.ris the link centre of masslink.r = ...checks and sets the link centre of mass
- property robot: BaseRobot | None
Get forward reference to the robot which owns this link
link.robotis the robot referencelink.robot = ...checks and sets the robot reference
- Returns:
The robot object
- property tlim: float | None
Get/set joint torque limits
link.tlimis the joint torque/force limitslink.tlim = ...checks and sets the joint torque limits
- Returns:
joint torque limits
Notes
The limits are not widely enforced within the toolbox.
If no joint torque limits are specified the value is
None
- Seealso:
- property v: BaseET | None
Variable part of link ETS
- Returns:
joint variable transform
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the latter.
Examples
>>> from roboticstoolbox import Link, ET, ETS >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> print(link.v) Rz(q0)
- A(q=0.0)[source]
Link transform matrix
- Parameters:
q (
float) – Joint coordinate (radians or metres). Not required for links with no variable- Return type:
- Returns:
link frame transformation matrix
link.A(q)is an SE(3) matrix that describes the rigid-body transformation from the previous to the current link frame to the next, which depends on the joint coordinateq.
- class roboticstoolbox.robot.Link.Link2(ets=[], jindex=None, **kwargs)[source]
Bases:
BaseLink- property B: float
Get/set motor viscous friction
link.Bis the motor viscous frictionlink.B = ...checks and sets the motor viscous friction
- Returns:
motor viscous friction
Notes
Referred to the motor side of the gearbox.
Viscous friction is the same for positive and negative motion.
- property G: float
Get/set gear ratio
link.Gis the transmission gear ratiolink.G = ...checks and sets the gear ratio
- Returns:
gear ratio
Notes
The ratio of motor motion : link motion
The gear ratio can be negative, see also the
flipattribute.
- Seealso:
flip()
- property I: ndarray
Get/set link inertia
- Returns:
link inertia
- Return type:
ndarray(3,3)
Link inertia is a symmetric 3x3 matrix describing the inertia with respect to a frame with its origin at the centre of mass, and with axes parallel to those of the link frame.
link.Iis the link inertialink.I = ...checks and sets the link inertia
The inertia matrix is
\(\begin{bmatrix} I_{xx} & I_{xy} & I_{xz} \\ I_{xy} & I_{yy} & I_{yz} \\I_{xz} & I_{yz} & I_{zz} \end{bmatrix}\)
and can be specified as either:
a 3 ⨉ 3 symmetric matrix
a 3-vector \((I_{xx}, I_{yy}, I_{zz})\)
a 6-vector \((I_{xx}, I_{yy}, I_{zz}, I_{xy}, I_{yz}, I_{xz})\)
Notes
Referred to the link side of the gearbox.
- property Jm: float
Get/set motor inertia
link.Jmis the motor inertialink.Jm = ...checks and sets the motor inertia
- Returns:
motor inertia
Notes
Referred to the motor side of the gearbox.
- property Tc: ndarray
Get/set motor Coulomb friction
- Returns:
motor Coulomb friction
- Return type:
ndarray(2,)
link.Tcis the motor Coulomb frictionlink.Tc = ...checks and sets the motor Coulomb friction. If a scalar is given the value is set to [T, -T], if a 2-vector it is assumed to be in the order [Tc⁺, Tc⁻]
Coulomb friction is a non-linear friction effect defined by two parameters such that
\[\begin{split}\tau = \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
Referred to the motor side of the gearbox.
- \(\tau_C^+\) must be \(> 0\), and \(\tau_C^-\) must
be \(< 0\).
- property Ts: ndarray | None
Constant part of link ETS
- Returns:
constant part of link transform
- Return type:
ndarray(4,4) or None
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the constant part. If no constant part is given, this returns an identity matrix.
Examples
>>> from roboticstoolbox import Link, ET >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> link.Ts array([[ 1. , 0. , 0. , 0. ], [ 0. , 0. , -1. , 0. ], [ 0. , 1. , 0. , 0.333], [ 0. , 0. , 0. , 1. ]]) >>> link = Link( ET.Rz() ) >>> link.Ts
- __str__()
Pretty prints the ETS Model of the link
- Return type:
- Returns:
pretty print of the robot link
Will output angles in degrees
- attach(object)
- attach_to(object)
- property children: list[Link] | None
List of child links
- Returns:
child links
The list will be empty for a end-effector link
- closest_point(shape, inf_dist=1.0, skip=False)
Finds the closest point to a shape
- Parameters:
- Return type:
- Returns:
(d, p1, p2) where d is the distance between the shapes, p1 is the point in the world frame on the link [x, y, z], and p2 is the point in the world frame on the shape [x, y, z].
closest_point(shape, inf_dist) returns the minimum euclidean distance between this link and shape, provided it is less than inf_dist. It will also return the points on self and shape in the world frame which connect the line of length distance between the shapes. If the distance is negative then the shapes are collided.
- collided(shape, skip=False)
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- property collision: SceneGroup
Get/set joint collision geometry
The collision geometries are what is used to check for collisions.
link.collisionis the list of the collision geometries whichrepresent the collidable shape of the link. :return: the collision geometries :rtype: list of Shape
link.collision = ...checks and sets the collision geometrylink.collision.append(...)add collision geometry
- copy()
Copy of link object
- Return type:
Self- Returns:
copy of link object
link.copy()is a new Link subclass instance with a copy of all the parameters.
- dyn(indent=0)
Inertial properties of link as a string
- Parameters:
indent – indent each line by this many spaces
link.dyn()is a string representation the inertial properties of the link object in a multi-line format. The properties shown are mass, centre of mass, inertia, friction, gear ratio and motor properties.Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> print(robot.links[2]) # kinematic parameters RevoluteDH: θ=q, d=0.15005, a=0.0203, ⍺=-1.5707963267948966 >>> print(robot.links[2].dyn()) # dynamic parameters m = 4.8 r = -0.02 -0.014 0.07 | 0.066 0 0 | I = | 0 0.086 0 | | 0 0 0.013 | Jm = 0.0002 B = 0.0014 Tc = 0.13(+) -0.1(-) G = -54 qlim = -2.4 to 2.4
- Seealso:
dyntable()
- property ets: ETS
Get/set link ets
link.etsis the link etslink.ets = ...checks and sets the link ets
- Parameters:
ets – the new link ets
- Returns:
the current link ets
- friction(qd, coulomb=True)
Compute joint friction
- Parameters:
- Returns:
the friction force/torque
friction(qd)is the joint friction force/torque for joint velocityqd. The friction model includes:Viscous friction which is a linear function of velocity.
Coulomb friction which is proportional to sign(qd).
\[\begin{split}\tau = G^2 B \dot{q} + |G| \left\{ \begin{array}{ll} \tau_C^+ & \mbox{if $\dot{q} > 0$} \\ \tau_C^- & \mbox{if $\dot{q} < 0$} \end{array} \right.\end{split}\]Notes
- The friction value should be added to the motor output torque to
determine the nett torque. It has a negative value when qd > 0.
- The returned friction value is referred to the output of the
gearbox.
- The friction parameters in the Link object are referred to the
motor.
Motor viscous friction is scaled up by \(G^2\).
Motor Coulomb friction is scaled up by math:
G.- The appropriate Coulomb friction value to use in the
non-symmetric case depends on the sign of the joint velocity, not the motor velocity.
- Coulomb friction is zero for zero joint velocity, stiction is
not modeled.
- The absolute value of the gear ratio is used. Negative gear
ratios are tricky: the Puma560 robot has negative gear ratio for joints 1 and 3.
- property geometry: SceneGroup
Get/set joint visual geometry
link.geometryis the list of the visual geometries whichrepresent the shape of the link :return: the visual geometries :rtype: list of Shape
link.geometry = ...checks and sets the geometrylink.geometry.append(...)add geometry
- property hasdynamics: bool
Link has dynamic parameters (Link superclass)
- Returns:
Link has dynamic parameters
Link has some assigned (non-default) dynamic parameters. These could have been assigned:
at constructor time, eg.
m=1.2by invoking a setter method, eg.
link.m = 1.2
Examples
>>> import roboticstoolbox as rtb >>> robot = rtb.models.DH.Puma560() >>> robot[1].hasdynamics True
- iscollided(shape, skip=False)
Checks for collision with a shape
- Parameters:
shape (
Shape) – The shape to compare distance toskip (
bool) – Skip setting all shape transforms
- Return type:
- Returns:
True if shapes have collided
iscollided(shape)checks if this link and shape have collided
- property isflip: bool
Get/set joint flip
- Returns:
joint flip
link.flipis the joint flip statuslink.flip = ...checks and sets the joint flip status
Joint flip defines the direction of motion of the joint.
flip = Falseis conventional motion direction:revolute motion is a positive rotation about the z-axis
prismatic motion is a positive translation along the z-axis
flip = Trueis the opposite motion direction:revolute motion is a negative rotation about the z-axis
prismatic motion is a negative translation along the z-axis
- property isjoint: bool
Test if link has joint
- Returns:
test if link has a joint
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the whether the Link contains the variable transform.
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[1].isjoint # link with joint True >>> robot[8].isjoint # static link False
- islimit(q)
Checks if joint exceeds limit
- Parameters:
q (
float) – joint coordinate- Returns:
True if joint is exceeded
link.islimit(q)is True ifqexceeds the joint limits defined bylink.Notes
If no limits are set always return False.
- Seealso:
- property jindex: int | None
Get/set joint index
link.jindexis the joint indexlink.jindex = ...checks and sets the joint index
- Returns:
joint index
For a serial-link manipulator the joints are numbered starting at zero and increasing sequentially toward the end-effector. For branched mechanisms this is not so straightforward. The link’s
jindexproperty specifies the index of its joint variable within a vector of joint coordinates.Notes
jindexvalues must be a sequence of integers startingat zero.
- property m: float
Get/set link mass
link.mis the link masslink.m = ...checks and sets the link mass
- Returns:
link mass
- property name: str
Get/set link name
link.nameis the link namelink.name = ...checks and sets the link name
- Returns:
link name
- property nchildren: int
Number of child links
- Returns:
number of child links
Will be zero for an end-effector link
- nofriction(coulomb=True, viscous=False)
Clone link without friction
- Parameters:
link.nofriction()is a copy of the link instance with the same parameters except, the Coulomb and/or viscous friction parameters are set to zero.Notes
- For simulation it can be useful to remove Couloumb friction
which can cause problems for numerical integration.
- property parent: Self | None
Parent link
- Returns:
Link’s parent
This is a reference to the links parent in the kinematic chain
Examples
>>> from roboticstoolbox import models >>> robot = models.URDF.Panda() >>> robot[0].parent # base link has no parent >>> robot[1].parent # second link's parent Link(name = "panda_link0")
- property qdlim: float | None
Get/set joint velocity limits
link.qdlimis the joint velocity limitslink.qdlim = ...checks and sets the joint velocity limits
- Returns:
joint velocity limits
Notes
The limits are not widely enforced within the toolbox.
If no joint velocity limits are specified the value is
None
- Seealso:
- property qlim: ndarray | None
Get/set joint limits
link.qlimis the joint limitslink.qlim = ...checks and sets the joint limits
- Returns:
joint limits
- Return type:
ndarray(2,) or None
Notes
The limits are not widely enforced within the toolbox.
If no joint limits are specified the value is
None
- Seealso:
- property r: ndarray
Get/set link centre of mass
- Returns:
link centre of mass
- Return type:
ndarray(3,)
The link centre of mass is a 3-vector defined with respect to the link frame.
link.ris the link centre of masslink.r = ...checks and sets the link centre of mass
- property robot: BaseRobot | None
Get forward reference to the robot which owns this link
link.robotis the robot referencelink.robot = ...checks and sets the robot reference
- Returns:
The robot object
- property tlim: float | None
Get/set joint torque limits
link.tlimis the joint torque/force limitslink.tlim = ...checks and sets the joint torque limits
- Returns:
joint torque limits
Notes
The limits are not widely enforced within the toolbox.
If no joint torque limits are specified the value is
None
- Seealso:
- property v: BaseET | None
Variable part of link ETS
- Returns:
joint variable transform
The ETS for each Link comprises a constant part (possible the identity) followed by an optional joint variable transform. This property returns the latter.
Examples
>>> from roboticstoolbox import Link, ET, ETS >>> link = Link( ET.tz(0.333) * ET.Rx(90, 'deg') * ET.Rz() ) >>> print(link.v) Rz(q0)
- A(q=0.0)[source]
Link transform matrix
- Parameters:
q (
float) – Joint coordinate (radians or metres). Not required for links with no variable- Return type:
- Returns:
link frame transformation matrix
link.A(q)is an SE(2) matrix that describes the rigid-body transformation from the previous to the current link frame to the next, which depends on the joint coordinateq.